ユニポスWEBサイトに、AIとロボットの研究に最適なヒューマノイドロボット「Mercury Humanoid Robot Series」 のページを追加しました。
Mercury は、中国 Elephant Robotics 社の開発した、軽量ロボットアームを搭載したヒューマノイドロボットシリーズです。以下3種類の製品がラインアップされています。

Mercury A1
軽量の 7DoF 協働ロボットアーム

Mercury B1
2つの 7DoF ロボットアームを備えたセミ・ヒューマノイドロボット

Mercury X1
2つの 7DoF ロボットアームと移動のためのモバイルベースを備えた汎用ヒューマノイドロボット
Mercury Robot シリーズ 共通のロボットアームには、 Elephant Robotics 社が独自開発したハーモニック・ドライブ・モジュール(「Power Spring」シリーズ) が 7個搭載されています (7自由度)。
またカーボンファイバー製のシェルにより、アーム1台(Mercury A1)あたり約3.5Kg の軽量化を実現しています。
Mercury Humanoid Robot Series 主な用途・活用分野
- 教育
- 科学研究
- ロボット工学
- 3D SLAM
- サービス
- レクリエーション
- VR 遠隔操作
各製品紹介

Mercury A1
軽量の7DoF協働ロボットアーム。 最大ペイロード 1kg、最大作業範囲 450mm、再現性 ± 0.05mm の性能を持っています。
シングルマスター制御とデュアルスレーブ制御方式を採用しており、 メインコントローラーは Cortext A72 – 1.5GHz です。 また本体に 2.0インチのタッチスクリーンを搭載しており、 Elephant Robotが独自に開発した「myPanel OS」のインターフェースにより、 プログラミングなしで迅速な配備と応用を実現します。


Mercury B1
2つのロボットアームを備えたセミ・ヒューマノイドロボット。Mercury A1 2台を搭載した合計17自由度を持っており、片腕の独立操作、及び両腕の協調操作が可能です。
頭部には9インチ高精細LCDタッチスクリーンが搭載されており、マルチポイント制御やユーザーカスタマイズによる表情表示に対応します。メイン制御モジュール NVIDIA Jetson Xavierと統合された3Dカメラにより、2D/3Dマシンビジョンガイド、掴み、VR遠隔操作が可能です。
またMercury B1は ChatGPT for Roboticsに適応しており、リアルタイム音声収集をサポートする高解像度マイクアレイを内蔵し、AI音声インテリジェント認識インタラクションの新しい体験をもたらします。

Mercury X1
2つのロボットアームと移動のためのモバイルベースを備えた汎用ヒューマノイドロボット。Mercury B1 と高性能モバイルベースで構成されており、合計19自由度を持っています。
マシン全体で、NVIDIA Jetson XviaerとJeston Nanoデュアルメインコントローラーを搭載しています。モバイルベースは、高性能 LiDAR、超音波センサ、2Dビジョンなど豊富な知覚を備えており、最大動作速度1.2m/sのダイレクトドライブモーターで駆動し、最大で2cmの高さ、15度の角度まで登ることができます。バッテリー寿命は最大8時間で、配膳ロボットや遠隔操作等の用途に対しても、信頼性の高いモバイル運用が可能です。
エンドエフェクタアクセサリ

Mercury Robot シリーズ には、3種類のグリッパー、サクションポンプ、2D/3Dカメラ用のフランジといった、アームの尖端に取り付ける各種専用アクセサリが用意されています (オプション)
- Mercury-Flexible Gripper
- Mercury-2D Camera Flange
- Mercury-Adaptive Gripper
- Mercury-Parallel Gripper
- Mercury-3D Camera Flange
- Mercury-Suction Pump
ソフトウェア環境 および 開発環境について
Mercuryロボットシリーズは、豊富なソフトウェアエコシステムと主要なプログラミング言語をサポートしています。
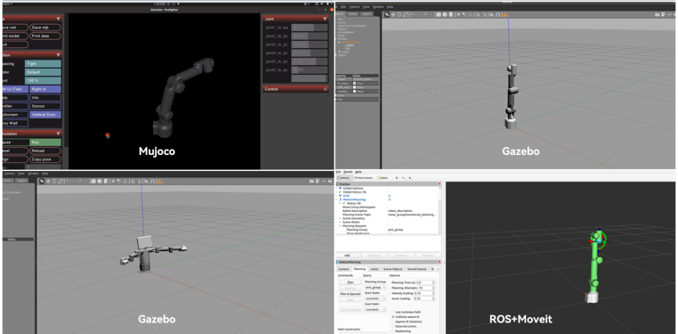
また、ROS、Moveit、Gazebo、Mujoco を含む主流なシミュレーション・プラットフォームに対応しており、マシンインテリジェンスの自律学習と迅速な反復能力を向上させます。
myPanel

Mercury A1 ロボットアームに内蔵された独自インターフェース。Mercury A1 の 2インチタッチスクリーンと組み合わせることで、ハードウェアを追加することなく、ロボットアームの迅速なティーチング、プログラミング、展開、デバッグを可能にします。
myBlockly

ビジュアルプログラミングソフトウェア。 ドラッグ&ドロップの簡単な操作で、複雑な機能を持つアプリケーションを開発することができます。
新たに備わったデュアル編集カラム機能、およびプリセットされたショートカットコマンドを使用して左右のアームを素早くプログラムすることができ、効率的なコラボレーションを実現します。
Python API 「pymycobot」
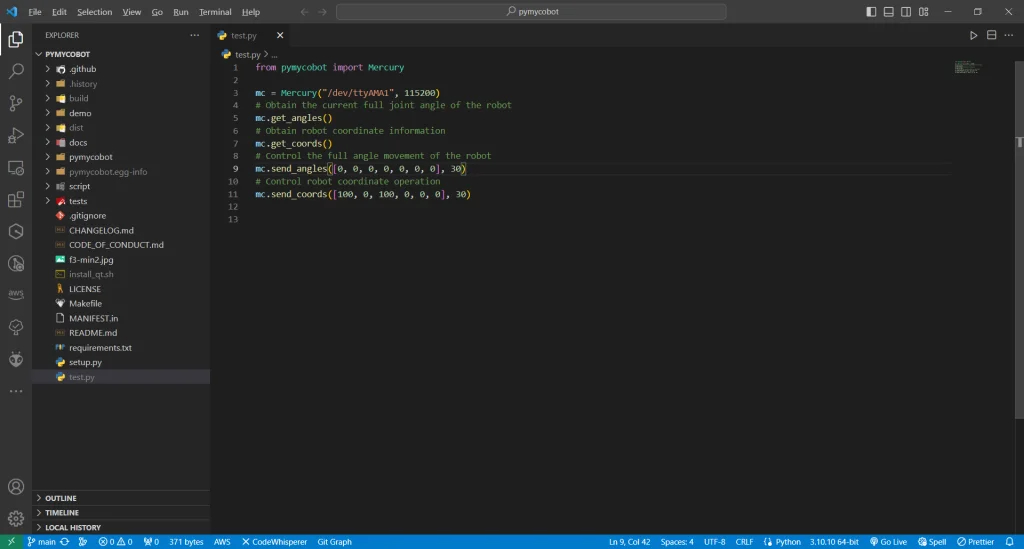
ElephantRobotics 製ロボットをサポートするように設計された汎用Python制御ライブラリ。 開発者がロボットにライン制御を入力するのを容易にする、シンプルで柔軟なインターフェイスを提供します。
C++ API 「Mercury API」
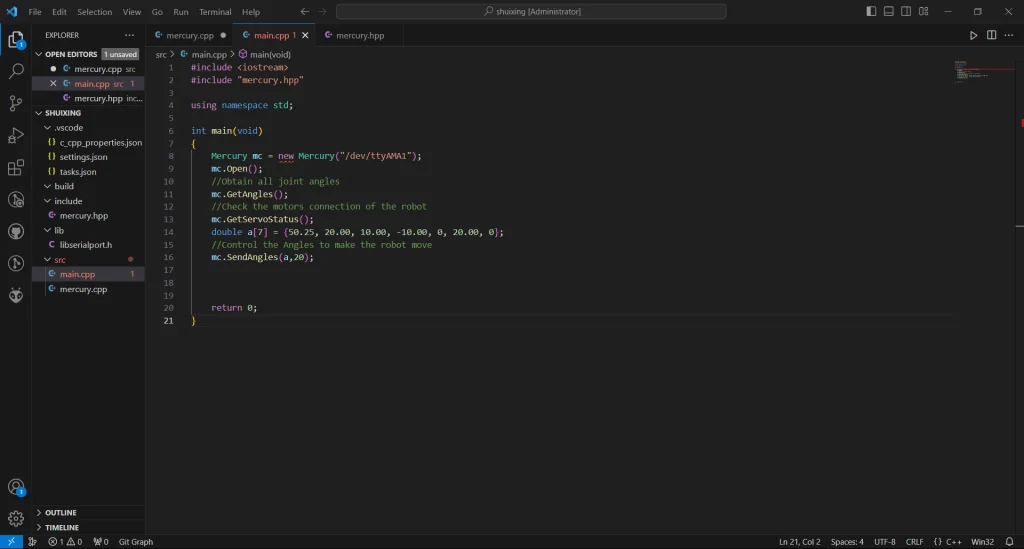
Mercury Robot シリーズ専用に設計されたC++制御インターフェース。 シンプルで使いやすく、ロボットの関節・姿勢・アクチュエータ を柔軟に制御でき、さまざまなシステムロボットのようなアプリケーションを迅速に実装することができます。
統合された7つのインテリジェントアルゴリズム

Mercury Robot シリーズは、上記「7つ」のインテリジェントアルゴリズムを統合しています。これにより、ロボットアームの運動性能と動力性能を全体的に向上させ、振動を抑制し、両アームのスムーズな協調を実現しています。また 視覚センサ、レーザーセンサ、音声センサとの深い統合により、LLM (大規模言語モデル)のサポートによる全方位的に3次元のマシンインテリジェンスを作り出します。
|
■商品の詳細、お問い合わせはこちら Mercury Humanoid Robot Series | 7自由度ロボットアーム ヒューマノイドロボット メーカー (Elephant Robotics) WEBサイト
|