弊社の 研究開発者向け海外製品調達・コンサルテーションサービス「ユニポス」では、様々な3Dカメラを取り扱っております。
「3Dカメラ」といっても種類が多いわりに大きさや形状は似通っており、それぞれがどのような特徴を持っているのか分かり難い、どのように選べばよいのか分かりづらいといったこともあるかと思います。
そこで今回は、弊社にある3Dカメラの実機を使用し「近距離に特化した検証」を行いましたので、ご紹介いたします。

目次
検証機について
今回の検証では、比較的近距離 (7cm~30cm) の撮影を得意とする、次の4つのデバイスを使用しました。
| Company | Product name | Product name | Min range | >Max range |
| Intel | RealSense D435 | 0.3m | 3m | |
| Intel | RealSense D405 |  |
7cm (0.07m) *ideal | 50cm (0.5m) *ideal |
| StereoLab | ZED 2i Stereo Camera (without polarizer / 2mm lens) |  |
0.2m | 20m |
| NextVPU | Feynman M1 Standard |  |
0.1m | 5.0m |
環境について
【検証に使うもの】
3Dカメラの他、撮影対象ターゲット、3Dカメラを設置するための三脚、カッティングボード(A1サイズ)、3Dカメラを接続するためのケーブル、PCです。

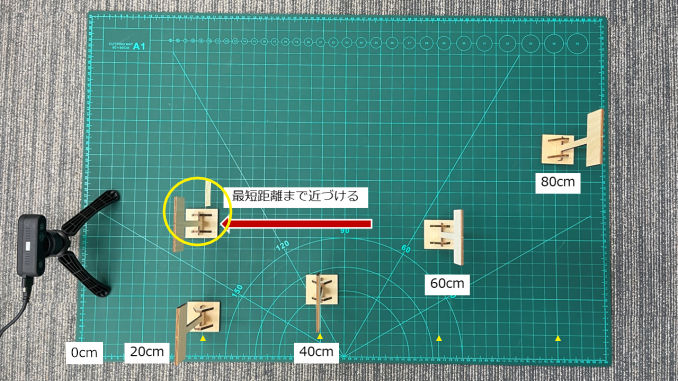
【配置イメージ】
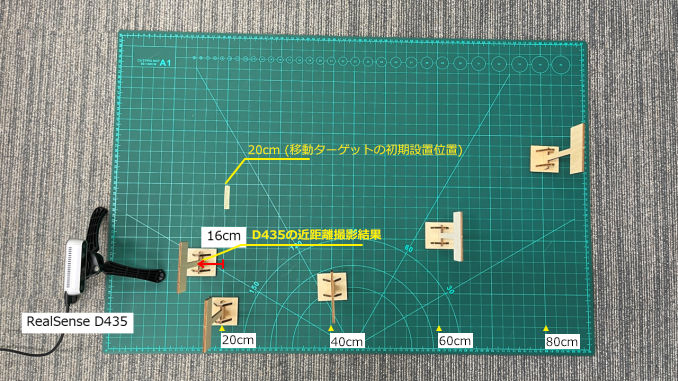
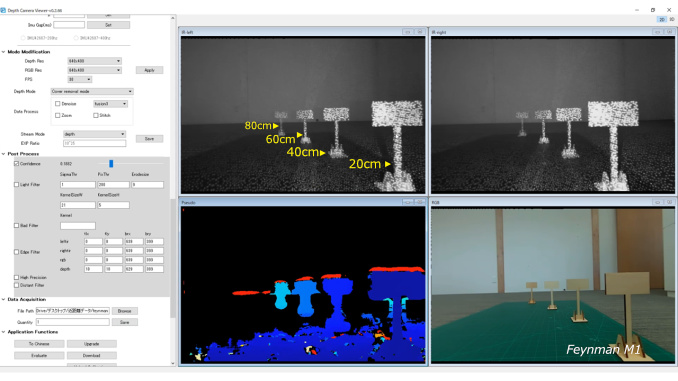
次の画像の通り、カメラの設置場所から 20、40、60、80cm の位置に撮影対象となるターゲットを配置。中央のターゲットのみを移動させ、近距離撮影の状態を確認します。
その後それぞれのカメラで、深度情報の取得ができる位置までターゲットを移動させ近距離撮影を行います。
いざ検証!近距離の物体撮影の比較
屋内の環境でどこまで近くのものを検知できるかを比較します。
結果 [1] RealSense D435

広視野角 (およそ90°) のD435は、ロボットやドローン等のナビゲートやトラッキング用途 に適しているデバイスです。最大深度10m強でありながら、近接撮影も可能です。
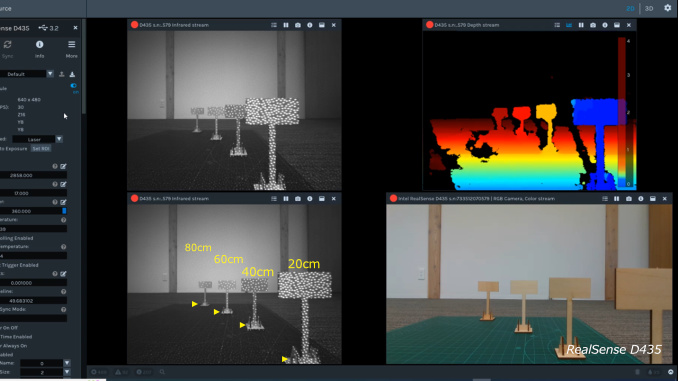
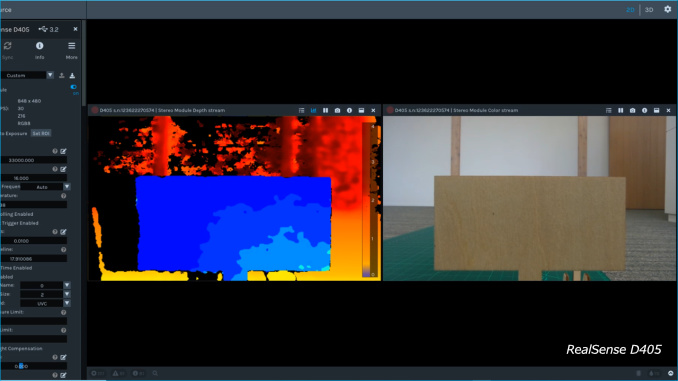
上記は定位置 (20、40、60、80cm) に配置されたターゲットをRealSense D435で撮影したものです。ここに近距離撮影用のターゲット配置し、D435へ近づけながら撮影を行います。
最小探知距離 (メーカー公称値) 0.3mのところ最短16cmまで 近づけることができました。
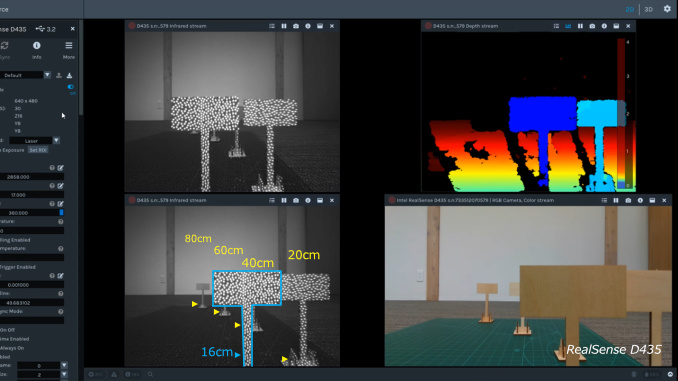
左下画像 (水色の部分) が、移動後のターゲット画像です。はっきりとその形状を映し出しています。
結果 [2] RealSense D405

D405 はピックアンドプレース、不良品検査、組立ライン検査、細密検査、傷検査装置、ロボット手術における創傷管理 (手術支援ロボット) などでの利用を想定した近距離に特化したデバイスです。
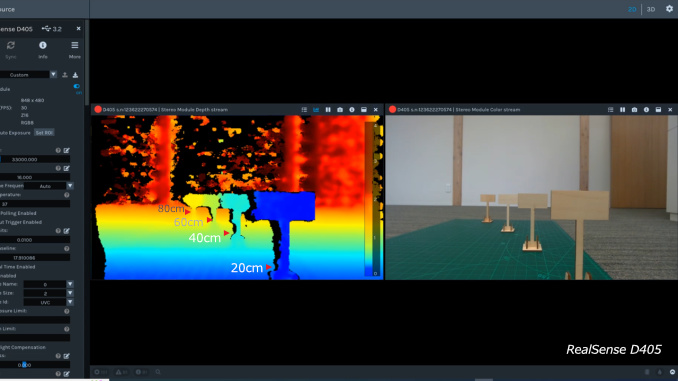
定位置 (20、40、60、80cm) に配置されたターゲットをRealSense D405で撮影しました。背景も含め、より正確に奥行きを捉えています。
ここへ近距離撮影用のターゲット配置し、D405へ近づけながら撮影を行います。
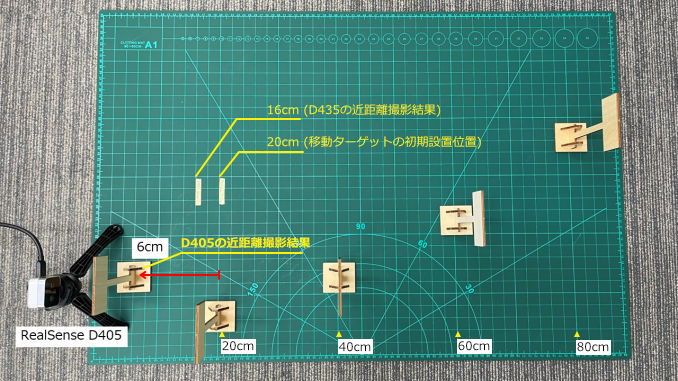
最小探知距離 (メーカー公称値) 7cmのところ、最短6cmまで 近づけることができました。
移動後のターゲット画像が最前面で撮影されています。
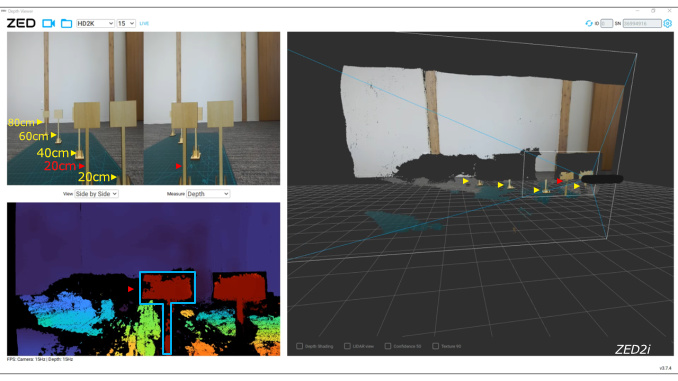
結果 [3] ZED 2i Stereo Camera

ZED 2i Stereo Cameraは、ほこり、水、湿気に強い防塵防水規格のIP66に対応した、医療、農業、産業など耐久性を求められる環境でご利用いただけるステレオカメラです。
定位置 (20、40、60、80cm)に配置されたターゲットをRealSense D405で撮影しました。背景も含め、より正確に奥行きを捉えています。
ここへ近距離撮影用のターゲット配置し、D405へ近づけながら撮影を行います。
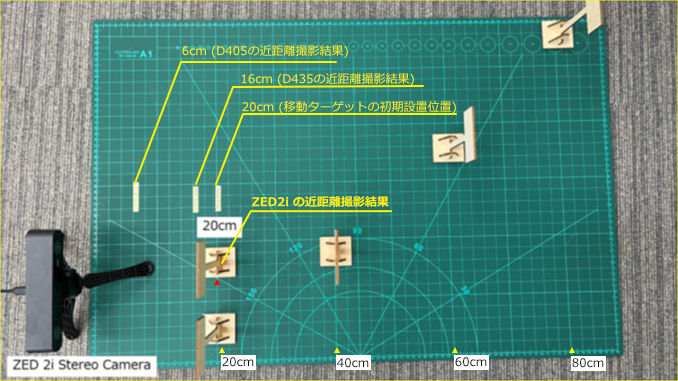
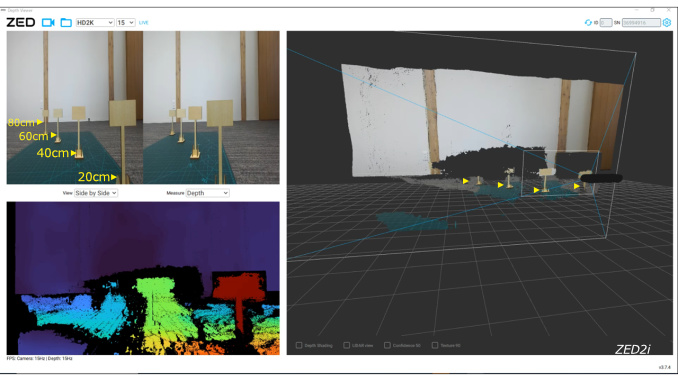
メーカー公称値通りの20cmとなりました。
しかし、次の画像の通り、奥の2つのターゲット (60、80cm) を検知していません。
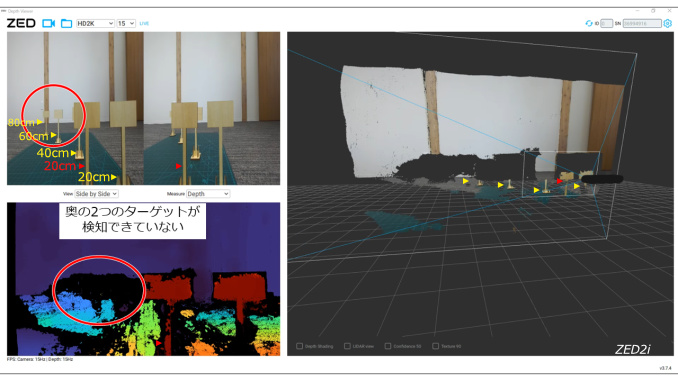
そこで、撮影ターゲットを単色ではなく濃淡のあるものへ変更してみたところ、問題なく検知することが分かりました。
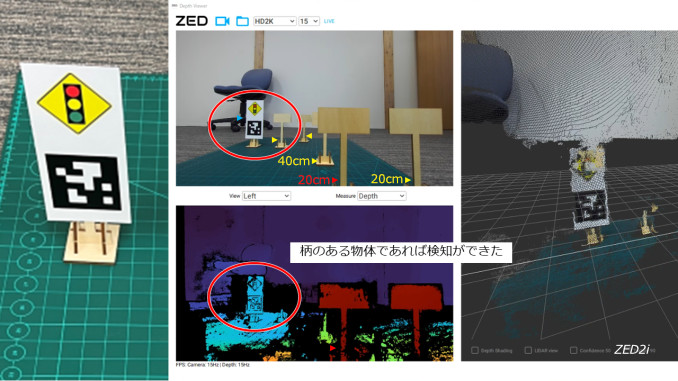
パッシブタイプのステレオカメラですと、ターゲットとなる対象物の色相が平坦で左右のカメラで視差がない場合に、深度情報を算出できないためと思われます。
結果 [4] Feynman M1 Standard

Feynmanは、自動運転車、UAV、AGV、ロボティクス、AR/VR、ドローン、AIoT、3Dスキャン、スマートロック、産業用途 (検査装置、検知装置) など幅広くご活用いただけるデバイスです。
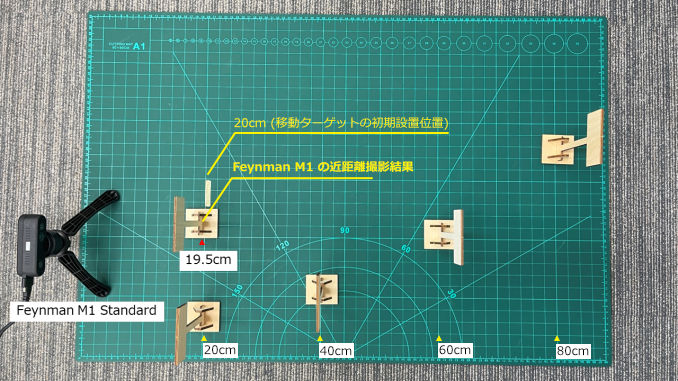
定位置 (20、40、60、80cm) に配置されたターゲットをFeynman M1 で撮影しました。
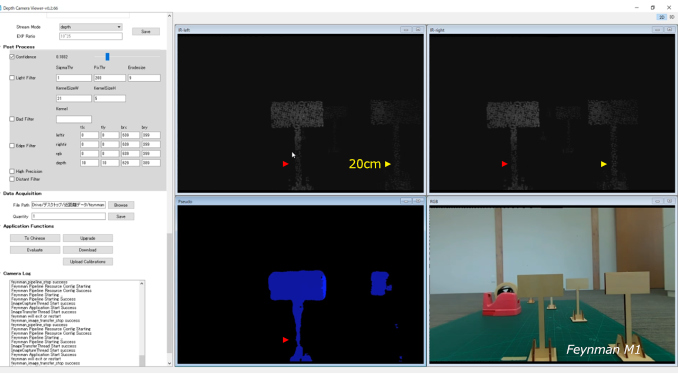
ここへ近距離撮影用のターゲット配置し、Feynmanへ近づけながら撮影を行います。
Feynman M1 は、最小探知距離 (メーカー公称値) 10cmのところ、19.5cm の結果となりました。※
※2022年9月7日追記
公称値についてあらためて問い合わせましたところ、メーカーより「RGBとDepthの解像度を320x200にすることで10cmまで測定できる」との情報をいただきました。
さっそく解像度の設定を変更し再測定いたしました。
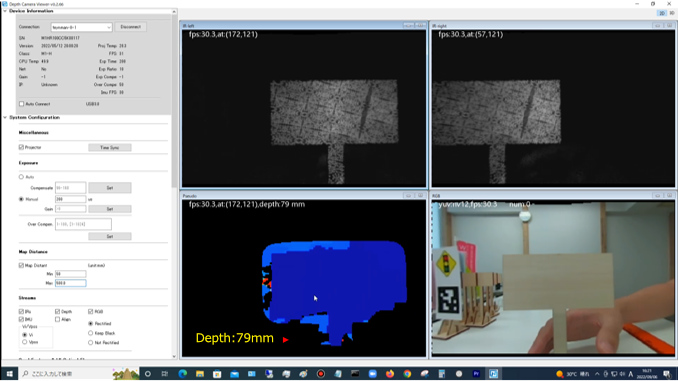
結果、下記の通り8cm程度まで検知させることができました。

結果まとめ
| Company | Product name | Min range (公称値) | 今回の環境での実測値 |
| Intel | RealSense D435 | 0.3m | 16cm (0.16m) |
| Intel | RealSense D405 | 7cm (0.07m) *ideal | 6cm (0.06m) |
| Stereolabs | ZED 2i Stereo Camera (without polarizer / 2mm lens) | 0.2m | 20cm (0.2m) |
| NextVPU | Feynman M1 Standard | 0.1m | 19.5cm (0.195m) ※8cm @320 x 200px |
| この記事を書いた人 : 新規事業開発室 庄司 この記事を書いた日 : 2022.9.1 |
|
3Dカメラの導入、選定にあたり「こういった環境で比較検証してほしい」といったご要望がございましたら、弊社で用意が可能な環境の範囲でご協力可能な場合がございます。詳細につきましてはこちらよりご相談ください。
|