「ロボット」というキーワードを耳にした時、皆さんはどのようなイメージを持ちますでしょうか?
(ちょっと例えが古いかもしれませんが…)鉄腕アトムや鉄人28号のように、いわゆるヒューマノイドと呼ばれるような人間の姿を模倣したものが思い浮かぶかもしれません。
人間のように頭、胴体、腕、足の機能を備えたロボットとして有名なものには以下のようなものがあります。
- Pepper (ソフトバンクロボティクス株式会社)
- NAO (ソフトバンクロボティクス株式会社・Aldebaran Robotics SAS)
- ASIMO (本田技研工業株式会社)
また人型だけでなく動物型のロボットペットもイメージしやすいかと思います。
- aibo (ソニー株式会社)
- LOVOT (GROOVE X 株式会社)
これらのロボットは生物として認識されるような「身体」をもつことで、より私たちと近しい存在として認識されているロボットだと言えます。
今回は、こういった身体をもったロボットではなく、生物のもつ機能を個別に持ち合わせている…という視点で、世界中のロボットを「機能部位ごと」にピックアップしてみました。各メーカーにより公開されている、それぞれの製品の動画も併せてご紹介いたしますので、実際の動きやどんなことができるのかもご覧いただければと思います。
こちらの記事は「手・腕 – オブジェクト取り扱いの機能を有するもの」編です。
順次、「足回り – 移動 の機能を有するもの」編などを、追加公開予定です。
→ 足回り編 (車両型ロボット・脚式ロボット) 公開しました! (2021.2.18)
目次
手・腕 – オブジェクト取り扱いの機能を有するもの
こちらでご紹介するのは、ロボットハンド や ロボットアームと呼ばれるものとなります。工学分野や産業分野ではマニピュレータとも呼ばれます。
工場内での部品のピックアップや組立を行うような協働ロボット(Cobot)のイメージが強いですが、最近では各メーカーの発表する動画でも家庭内での使用を想定したシーンが多く、私たちの生活の中にこういったロボットが活用される未来がすぐそこまで来ていることを感じさせます。
手 (ロボットハンド)

複数の指や爪を備えており、つまむ、つかむといった動作をする、人間でいうと手首から先の機能をもったロボットです。指の数や、関節にあたるDoF(自由度)の数などによってさまざまな種類があります。後述する「アーム」と組み合わせて使用することが多く、具体的な「作業」を受け持つ部分となります。
EZGripper / SAKE Robotics (米国)
劣駆動機構のグリッパータイプのロボットハンド。鉛筆のような細いものは先端でつまむ、大きなものは包み込むようにつかむというように動作を使い分け、様々なものをつかむことができます。最大5kgのものを取り扱うことができ、別売のマウンタを用いて複数のEZGripperを同期させることでそれ以上の重さにも対応します。
動画では、EZGriperが対象に合わせて掴み方を微妙に調整し、しっかりとホールドしているのがわかります。

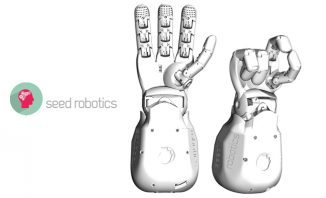
RH Manipulator , Dexterous Hand / Seed Robotics Ltd (イギリス)
指の数や、自由度 やアクチュエータの数により、動作の精度が異なる 5種類のモデルがラインアップされています。上位モデル (RH7D/RH8D)では、親指の内転と屈曲をそれぞれ独立して制御することのできる 球体手首関節と、opposable thumb (親指が同じ手の他の指と対置できる状態)の仕様が取り入れられ、人間の手の重要な特徴を実装し、高度で複雑な操作が可能です。
以下の動画では、センサグローブ制御によりオペレーターと同じ動作をするRH4D (3指タイプ)と、テーブル上のRH7D (4指タイプ) の動きをご覧いただけます。

qb SoftHand / qbrobotics (イタリア)
soft-robotics テクノロジーをベースとした、擬人化(anthropomorphic)ロボットハンド。19DoFの5本の指を単一のモーターで制御しており、 制御動作を変更することなく様々なオブジェクトを取り扱うことができる柔軟性と適応性を持っています。産業用タスク向けに設計された qb SoftHand Industry と、 教育分野や研究用途向けに設計された qb SoftHand Research の2種類のモデルがラインアップされており、それぞれデンマークのロボットメーカー Universal Robots のURロボット(アーム)と組み合わせて使用することのできるUR+認証を受けています。
以下の動画では、バイクのハンドルを握る、アクセルを回す、ブレーキをかける、といった動作を行う様子をご確認いただけます。なお動画の最後でわかるように、qb SoftHandはその名の通り指先がやわらかく、取り扱うものを傷つけない、人や他のロボットにぶつかっても危険が少ないといったことも特徴です。

腕 (ロボットアーム)

複数の関節を備え、人間でいう肩や肘や手首にあたる部分を動かして思い通りの位置に持っていく役割を持つロボットです。6自由度で人間が行うのと同じような動きが一通りできるといわれています (川崎重工業株式会社さまのWEBサイトの説明および動画が、とても分かりやすいです)。
ロボットアームは基本的に、先端に前項のロボットハンドのような機能を持ったエンドエフェクタを取り付けて使用します。エンドエフェクタは、ハンドのように物を摘まんだり掴んだりするものだけでなく、「サクションカップ」と呼ばれるポンプで空気を操作しオブジェクトを吸着し取り扱うものや、3Dプリントを可能にするものなど、用途に合わせて取り換えられることが特徴です。
※ユニポスWEBサイトでは、Niryo One, OpenManipulator, X-Series Robotics Arms, uArm Swift Pro 等の機能比較表を掲載しています |
Ned / Niryo (フランス)
※ 2021年1月26日 : 最新モデルNed に差し替えました
6軸制御のオープンソース・ロボットアーム。オプション品の5種のエンドエフェクタパーツを付け替えることで、様々なオブジェクトを取り扱うことができます。前モデルNiryo Oneと比較し精度と再現性が向上しており(0.5mm)、またスムーズな動きを実現するアルミニウム構造採用などにより、 産業の現場で必要とされる複雑な動きを再現する協働ロボット (Cobot)向けのモデルです。 Industry 4.0 指向に基づいた生産ラインでのロボット活用プロトタイピングに適しています。
動画では同社製のEcosystem (Conveyor Belt / Vision Set) を用いて、Nedが生産ラインでの動きをイメージしたピックアップ作業をしている様子や、仕様・特徴などの情報が紹介されています。

Open Manipulator / ROBOTIS (韓国)
ROBOTIS社のデジタルコマンド式サーボモータ X430シリーズを関節部に採用した 研究・競技用の小型ロボットアーム。700gと軽量でモバイルロボット等への搭載に適しています。容易な拡張性とメンテナンスに適したモジュラー構造となっており、メーカーより提供されているCADデータを用いることで、樹脂パーツ部分を3Dプリンタで自作することも可能です。 ROS, Arduino, Processingなどのオープンソースソフトウェアで利用可能です。
メーカーではOpen Mnipulator についての紹介動画が 1~19とシリーズで公開されています (以下は 1の動画です )。

X-Series Robotics Arms / Trossen Robotics (InterbotiX) (米国)
上記 Open Manipulator と同様に、ROBOTIS製のスマートサーボモータ( DYNAMIXEL X-Series )を搭載した、小型のロボットアーム。搭載モーター別に4種類のシリーズがあり、またリーチの長さやペイロード、精度などにより細かくモデルラインアップが分かれています。
以下の動画は、「Puppet Control 」機能により、ひとつのアーム (トルクオフ状態)を手で直接操作することで、複数のモデルの X-Series Robotic Arm (トルクオン状態)を動かしている様子です。きれいにシンクロしていて、見ていて気持ちがいいですね。

uArm Swift Pro / uFactory (中国)
コンシューマレベルのArduinoベース オープンソース卓上ロボットアーム。こちらもNiryo と同様に、Blocky の対応などロボット工学の学習や教育向けキットとしても最適な製品です。再現性の精度が高く(0.2mm)、別売のオプションパーツを用いることで3Dプリントやレーザー刻印など、少し変わったことも実現できることが特徴です。
動画では、uArm Swift Pro が将棋やアイスホッケーのようなゲームに用いられる様子、オペレーターの顔を追跡して常に顔にファン(扇風機)をあてる様子といった、ロボットアームのカジュアルな使われ方をイメージすることができます。

xArm / uFactory (中国)
上記 uArmと同じく uFactory社の製品ですが、製品の生産性や品質の向上のために開発された産業用ロボットアームとしての性格が強い製品です。動作範囲700mm、0.1mm精度の再現性を持っており、専用アプリケーション xArm Studioによりコーディングなどの必要なく簡単に動作させることができるほか、Python, ROS, C++に対応した xArm SDKも提供されています。またxArmは有効荷重や自由度により3種類のモデルが用意されています。
動画では、最大7DoFの自由度を持つxArm が、しなやかに、スムーズに、さまざまなタスクをこなす様子をご覧いただけます。

手・腕 と 足回り の機能を併せ持つもの

手や腕のもつ「オブジェクトの取り扱い」と、足回りのもつ「移動」の機能を併せ持つことで、ロボットはより具体的なタスク (人間に近い行動)をこなせるようになります。
Stretch RE / hello robot (米国)
3Dカメラ、9自由度の慣性計測ユニット(IMU)とLiDAR、車載コンピュータなどを搭載した自律移動ロボットに、 人間の腕の代わりとなる細い伸縮アーム・グリッパーが取り付けられたモバイルマニピュレータ。デフォルトで付属する Compliant gripper は、バネとゴム製の吸盤が指先の役割をする、物体をつかむことに優れたグリッパーです。高い摩擦力で対象物と接触できることから、錠剤のような小さなものも掴むことができます。
現在販売されているのは 研究用途向けの Research Edition ですが、動画では人々の生活の中でStrech が活用されることが想定されています (hello robot社は、元Google社員のAaron Edsinger氏とジョージア工科大学のCharlie Kemp教授により設立され、ロボットの活用により、高齢者、障害者、介護者がより豊かで生活しやすくなるようモバイルマニピュレータ開発に取り組んでいます)。

番外編 – 手・腕の機能を”拡張”するもの
以前弊社でも取り扱いをしていた Brunel Hand (現在は販売終了) のメーカーである Open Bionics 社では、現在 Hero Arm と名の付けられた義手シリーズを製造・販売しています。ヒーロー映画の登場人物のようなカッコいい義手を付けた人々が、思い思いのライフスタイルを楽しむ表情が眩しいです。
人間のもつ機能を抽出したロボットだけでなく、人間自身の機能を拡張するロボット技術も進歩しています。ロボット技術は今後双方向に、進歩していくことでしょう。

その他の機能部位 記事へのリンク
- 「足回り – 移動 の機能を有するもの」 編
- 「感覚の機能を受け持つもの」 編 (準備中)
※公開準備が出来次第、このページでもご案内します。