

|
【ご確認ください】こちらは以下の記事の続編記事となります |
前回に引き続き、弊社に実機のある下記の8種類の3Dカメラで実施しました異なる環境での比較検証結果をご紹介します。
目次
検証機について (再掲)

| Intel RealSenseシリーズ | Stereolabs ZEDシリーズ | ・Orbbec ・LIPS Corporation |
|
| ①RealSense D415 | ③RealSense D455 | ⑤ZED 2 Stereo Camera | ⑦Orbbec Astra Embedded S |
| ②RealSense D435 | ④RealSense L515 | ⑥ZED Mini | ⑧LIPSEdge DL |
※各製品名をクリックすると、ユニポスWEBの製品ページへ移動します
検証環境B : 屋内
3Dカメラを接続するコンピュータのスペックは、屋外編と同じく以下となります。
| CPU | Intel Core i9 9900K (3.60GHz 8コア) |
| メモリ | 16GB |
| GPU | NVIDIA Geforce RTX2080Ti 11GB |
| OS | Windows 10 Professional 64bit |
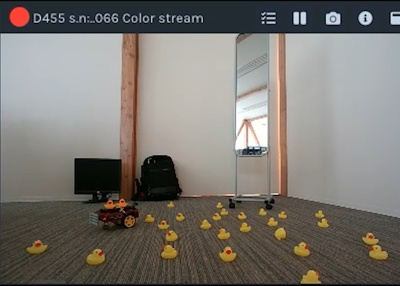
検証を実施した部屋の奥行き感と、カメラと撮影対象との位置関係は以下のような距離感となっています (Duckietown の動画で使用したアヒルちゃんを床に並べてみました)。

※ 画像に写ったカメラは左から D415 / D435 / D455 / L515 となります
また、「黒い物体を撮影するとどうなるのか」「鏡はどのように認識されるのか」という検証のため、黒いリュックサックやディスプレイ、鏡を部屋に配置しての撮影も行いました。
Intel RealSenseシリーズ
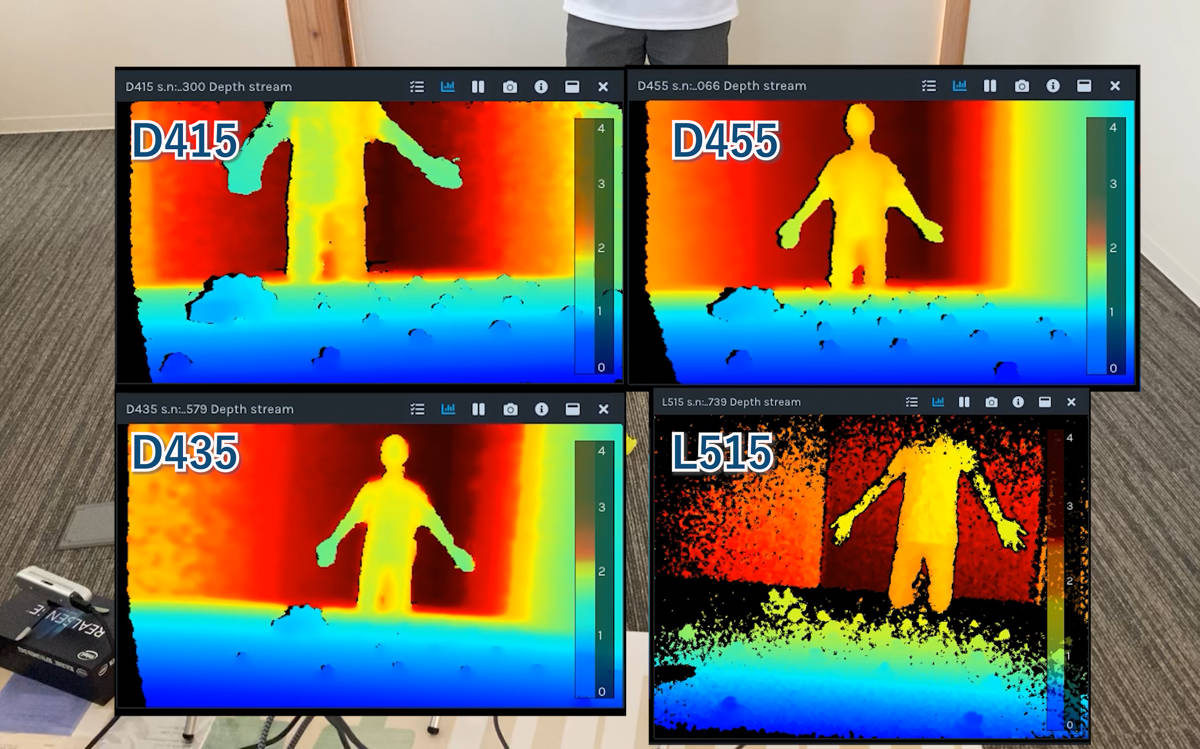
まずこちらが 屋内でのRealSense シリーズのデータ取得結果です。
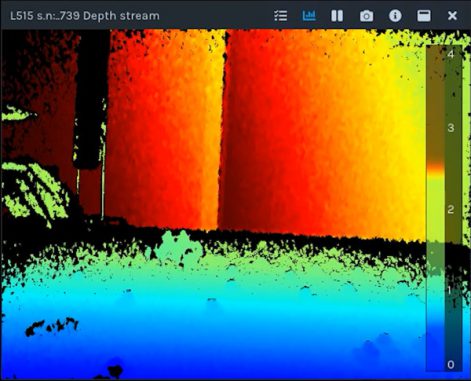
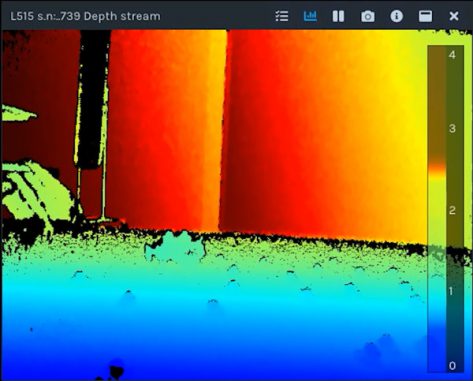
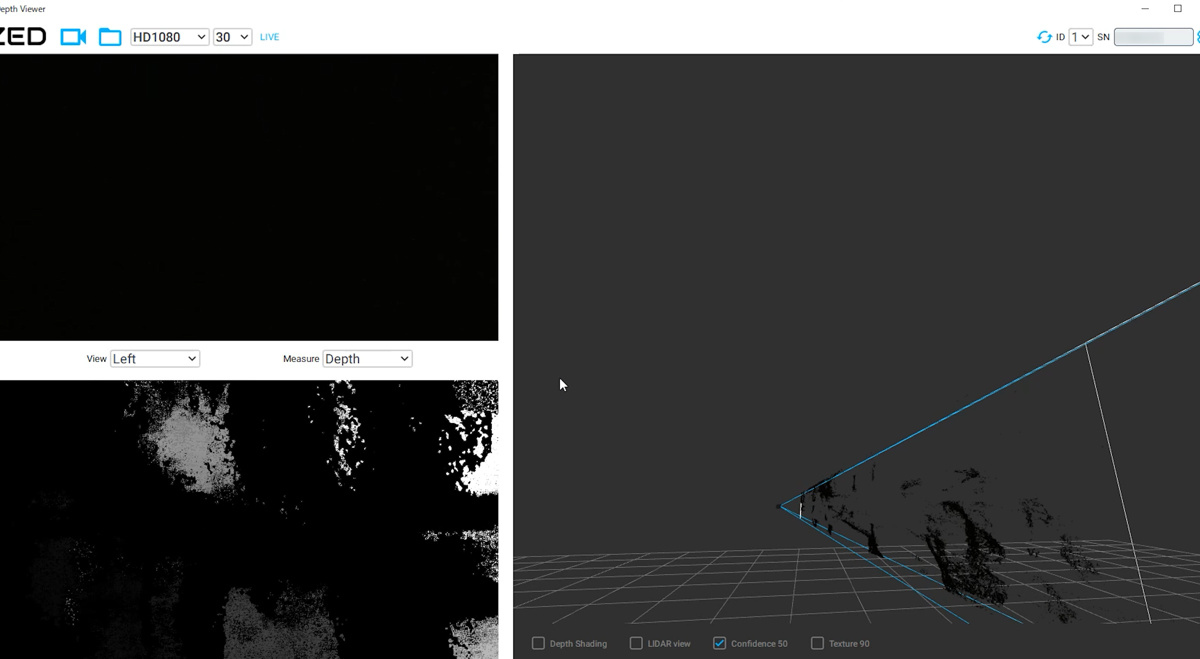
こちらのデータに関し後程判明したことですが、L515は窓から入る光や、他の3Dカメラの発する光源の影響を受けるようです。
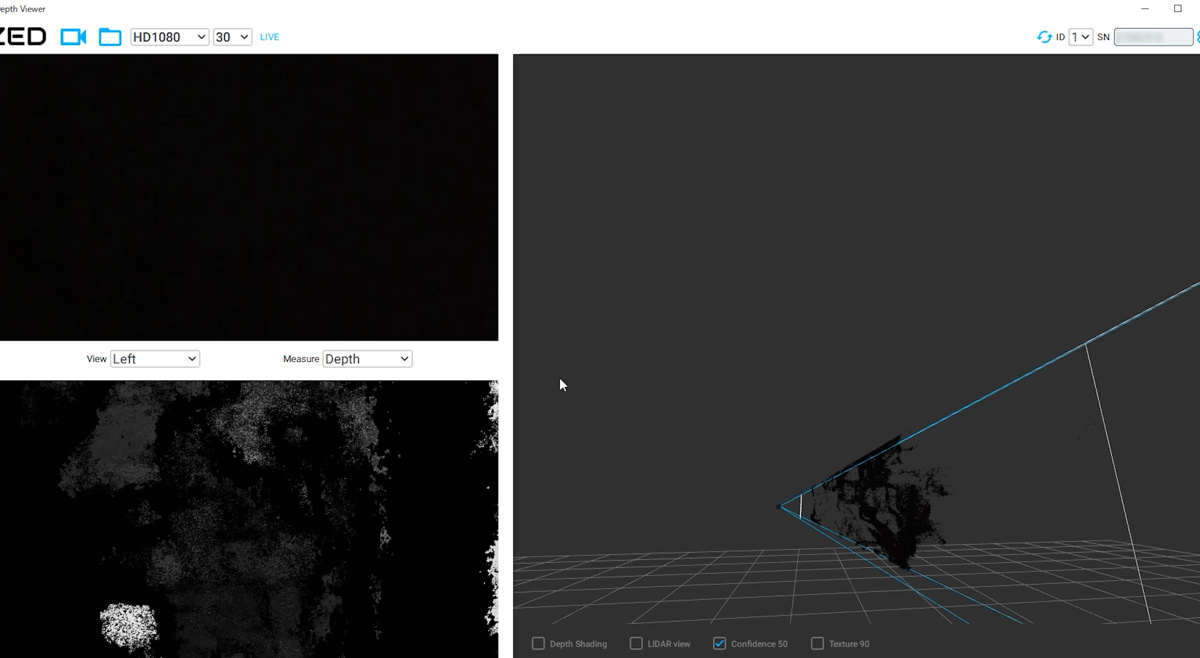
例として以下のように、昼頃 (左の画像)よりも日没直前 (右の画像)の方がはっきりと距離データが得られています。
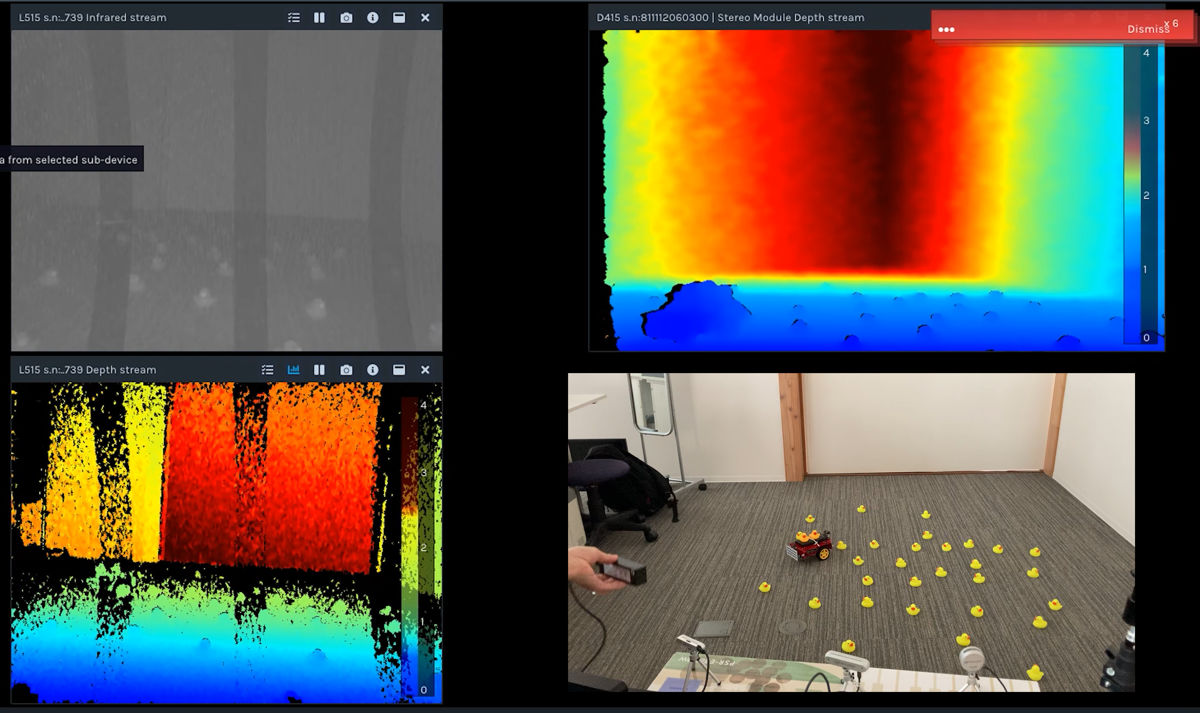
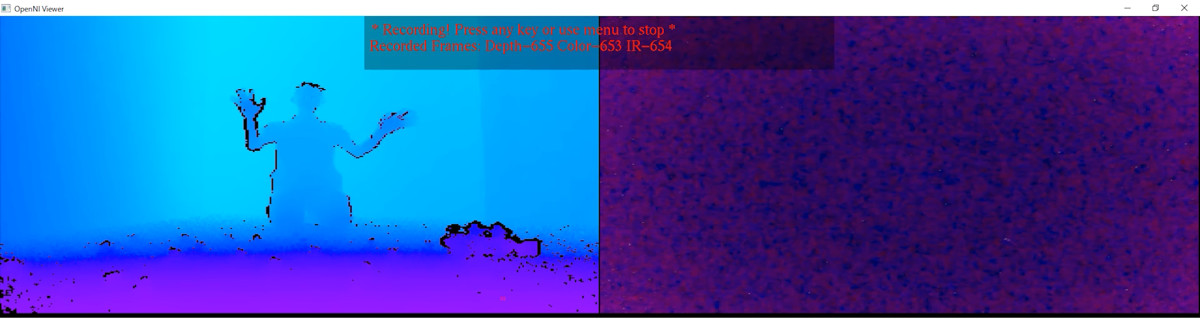
また、以下画像の右下に写っているように、Time-of-Flight (ToF)方式の3Dカメラである LIPSedge を同時に動かしたところ、L515 はLIPSEdgeから発せられる赤外線パターンの影響を受けているようです (左側2つの画面に写りこんだ3本の線)。
なお同時に動かしたD415 については影響を受けませんでした (右上)。
続いて、黒いリュックサックとディスプレイ、および鏡を置いての撮影では、それぞれこのようにデータが取得されました。
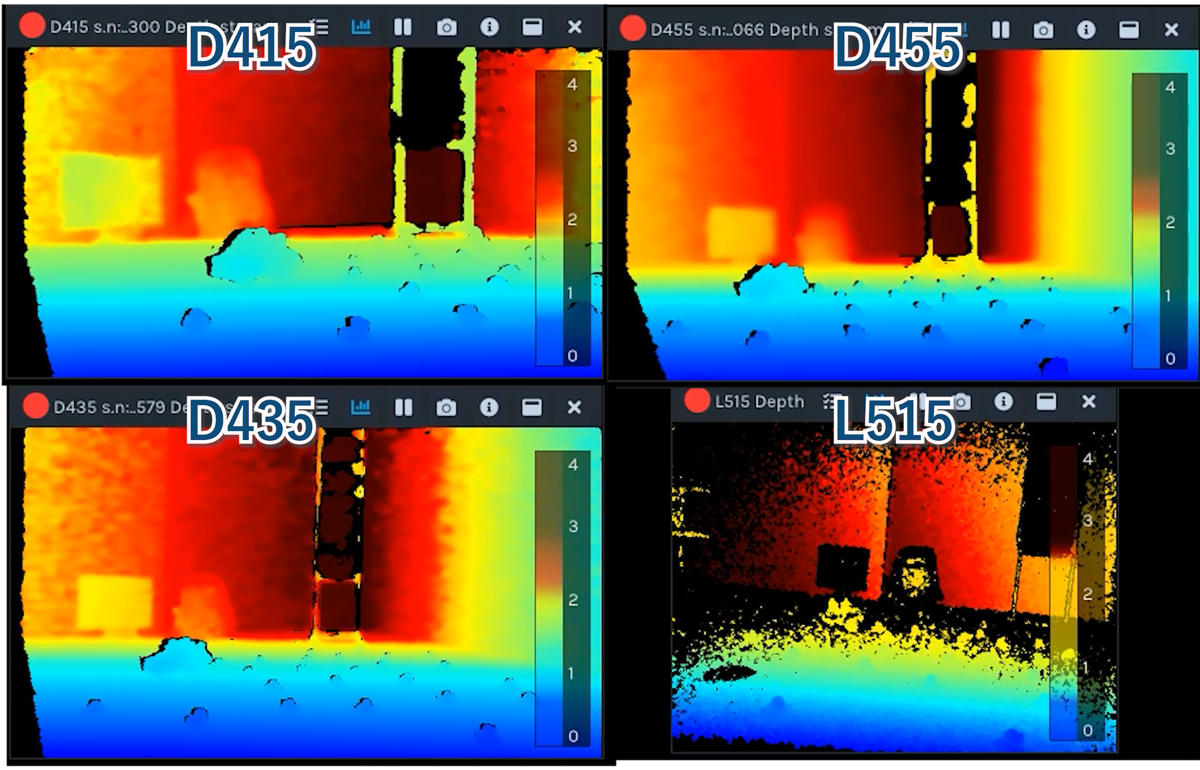
D415 / D435 / D455は、黒いディスプレイとリュックサック(黒い物体)を検知出来ました。一方、鏡面の認識はどのRealSense製品でも難しそうです。
Stereolabs ZEDシリーズ
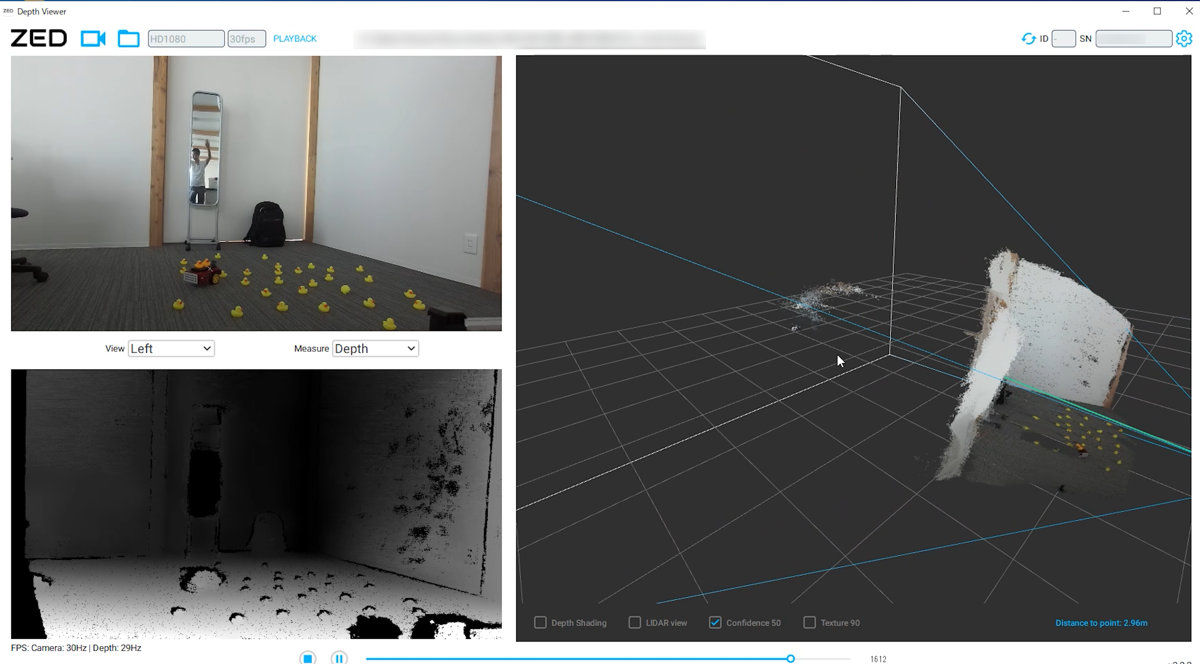
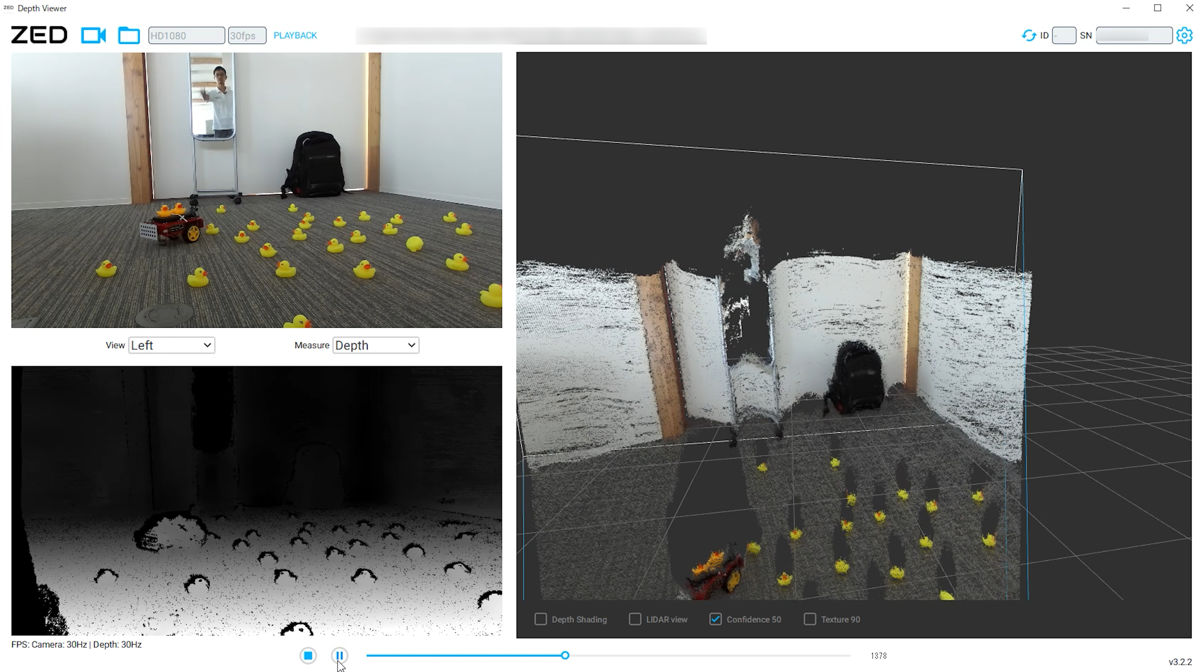
ZED 2 Stereo Camera / ZED Mini は下記のようにデータが取得できました。床においたアヒル一匹一匹の位置が分かります。
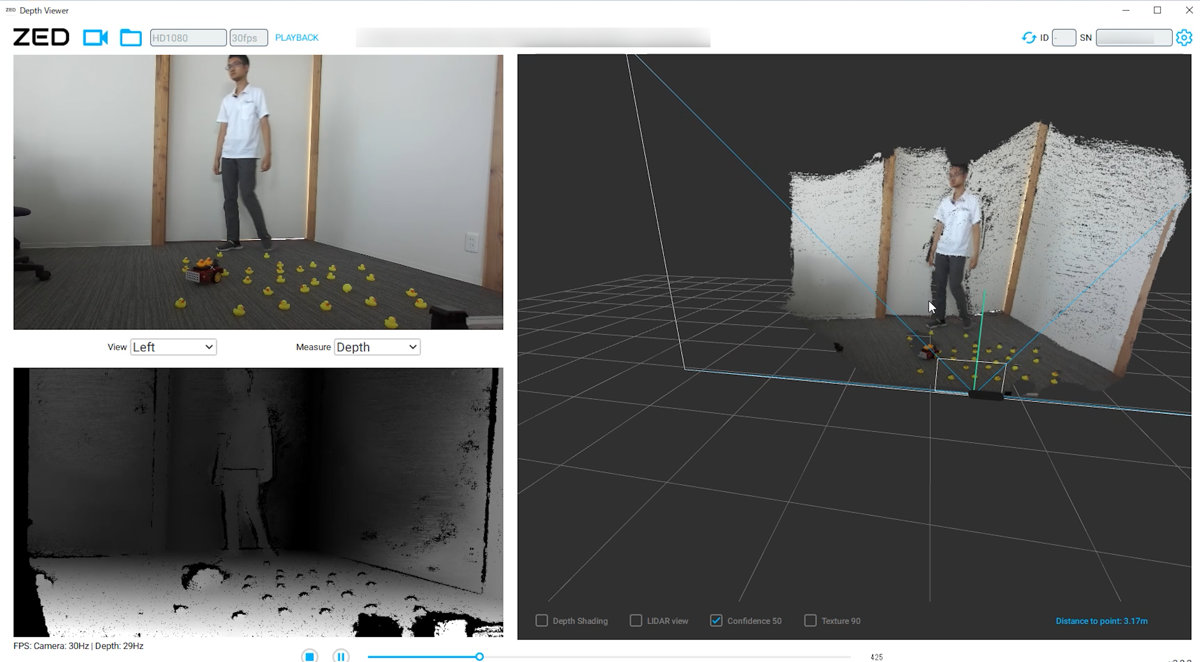
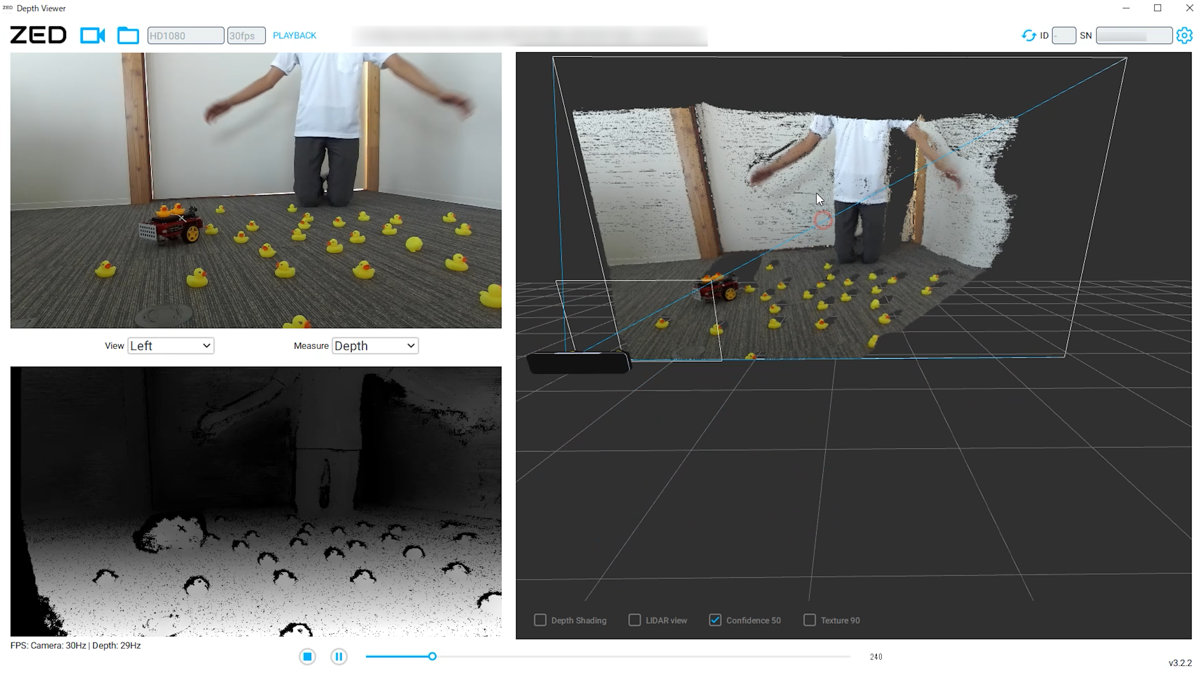
また黒い物体(リュックサック)と鏡の撮影については、リュックサックは以下のようにそれぞれデータが取得されていますが、前編の屋外での真っ白のシャツと同様、真っ黒な物体の場合、視差が得られず距離が算出できなくなる可能性があります。なお鏡に映っているオブジェクトは原理上、より遠くに位置するものとして検知されるようです。
Orbbec Astra Embedded S
Astra Embedded S については、黒い物体であるディスプレイもリュックも下記のとおり検知が出来ました。鏡に関しては、他の製品同様距離データは得られません。
LIPS Corporation LIPSEdge DL
LIPSEdge DL については、前編の屋外での検証ではデータを取得できませんでしたが、本来の用途である屋内での使用では通常通り動作します。黒い物体については、リュックの方は取れていますが、ディスプレイは検知できませんでした。物体表面の反射特性によって違いがありそうです。
検証環境 C : 暗い部屋
また、屋内の番外編として、このように肉眼では何も見えない部屋で各種デバイスを動かしてみました。
Intel RealSenseシリーズ
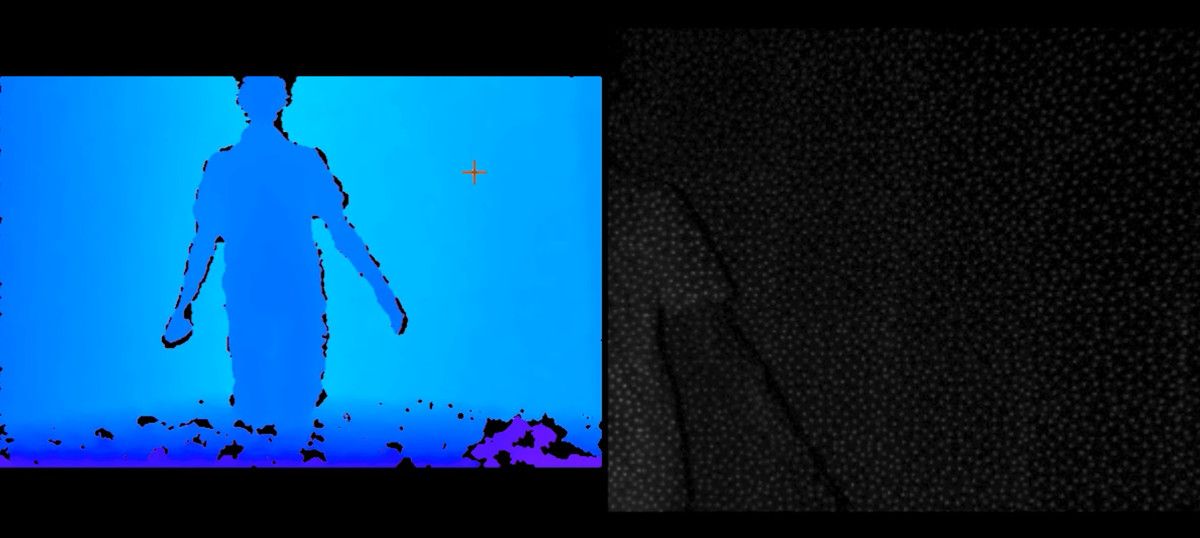
RealSenseシリーズは、真っ暗な部屋ではこのようになりました。
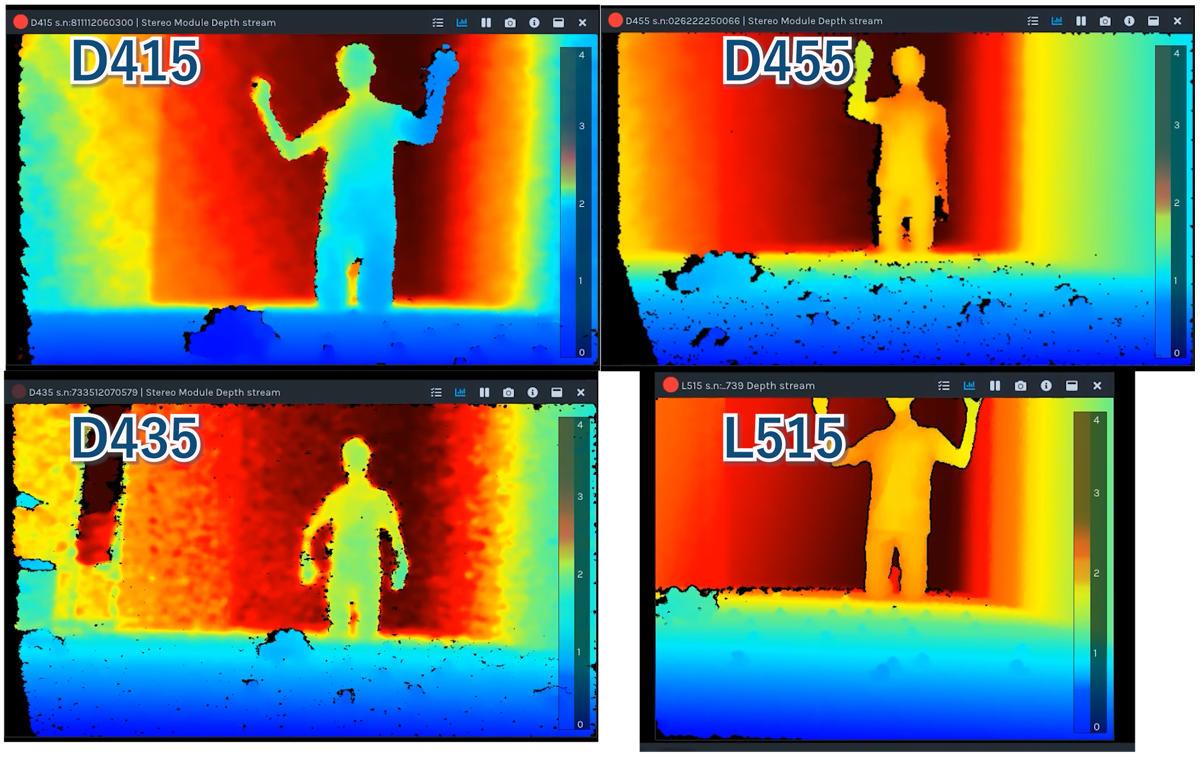
先ほどまでとは一転して、L515では服のシワが分かるレベルの高精度でデータが取得できています。他のカメラもデータは得られているようですが、D435は少し精度が荒いようです (設定の問題かもしれませんが、理由は分かりませんでした)。
Stereolabs ZEDシリーズ
ZED 2 / ZED Mini については予想はしていましたがデータを取得することができませんでした。
ZEDシリーズはパッシブタイプの3Dカメラのため、ある程度の光量が必要です。
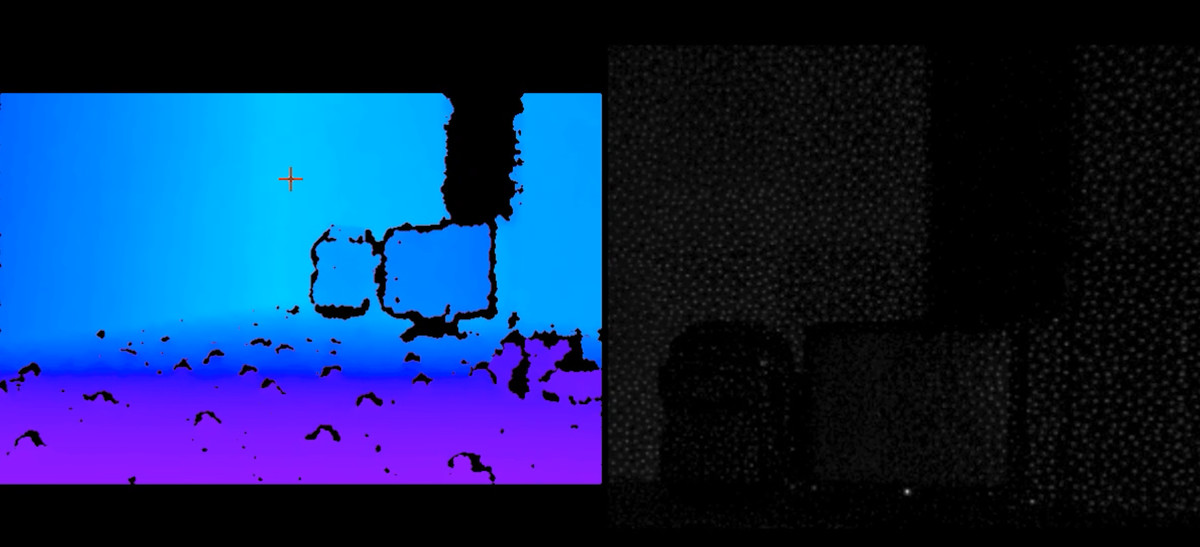
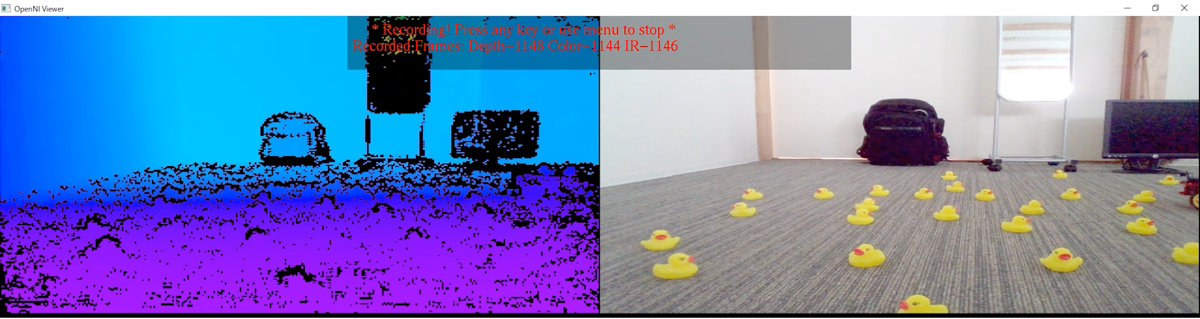
Orbbec Astra Embedded S および LIPS Corporation LIPSEdge DL
Astra Embedded S / LIPSEdge DL は暗闇でも動作しました。
これらの、デバイスから赤外線を発するタイプの3Dカメラは、外光が無い場所でもデータを取得できます。
まとめ
8種類の3Dカメラでの異なる環境下での動作比較検証は以上となります。
3Dカメラそれぞれの距離データの検出方式によっては、周辺環境の影響を大きく受けます。特に 今回の検証においては、RealSense L515については顕著に周辺環境の影響が現れました。理想的な環境 (外光が無い暗い場所)では高品質なデータが得られますが、太陽光や他の3Dカメラの影響を受けることが確認できました。
逆に、ZED シリーズのようなパッシブタイプの3Dカメラは、暗闇では用いることが出来ません。
このような結果からも、3Dカメラの選定にあたっては、使用予定の周辺環境を考慮に入れると良いでしょう。
今回の記事がご参考になりますと幸いです。
|
※今回の記事はこちらの検証動画を元にしております。実際の動作の様子は動画の方がよりわかりやすいかと思いますので、よろしければこちらも併せてご覧ください。 【3Dカメラ 8種を比較】RealSenseやZEDなど 様々な環境で動作させてみました Depth Camera Compare in various environment
|


