

弊社の 研究開発者向け海外製品調達・コンサルテーションサービス「ユニポス」では、RealSense をはじめ、様々な3Dカメラを取り扱っております。

しかし、3Dカメラと言っても種類が多く、それぞれがどのような特徴を持っているか分かりづらい、選びづらいといったこともあると思います。そこで、弊社に実機のある下記の8種類の機種について、いくつかの環境で比較検証を行いましたのでご紹介します。
※今回の記事はこちらの検証動画を元にしております。実際の動作の様子は動画の方がよりわかりやすいかと思いますので、よろしければこちらも併せてご覧ください。
目次
検証機について

| Intel RealSenseシリーズ | Stereolabs ZEDシリーズ | ・Orbbec ・LIPS Corporation |
|
| ①RealSense D415 | ③RealSense D455 | ⑤ZED 2 Stereo Camera | ⑦Orbbec Astra Embedded S |
| ②RealSense D435 | ④RealSense L515 | ⑥ZED Mini | ⑧LIPSEdge DL |
※各製品名をクリックすると、ユニポスWEBの製品ページへ移動します
検証環境 : A. 屋外

撮影日は2020年8月22日 (土) 、撮影場所は山形県、曇り時々晴 25℃~30℃ の環境下で検証しました。
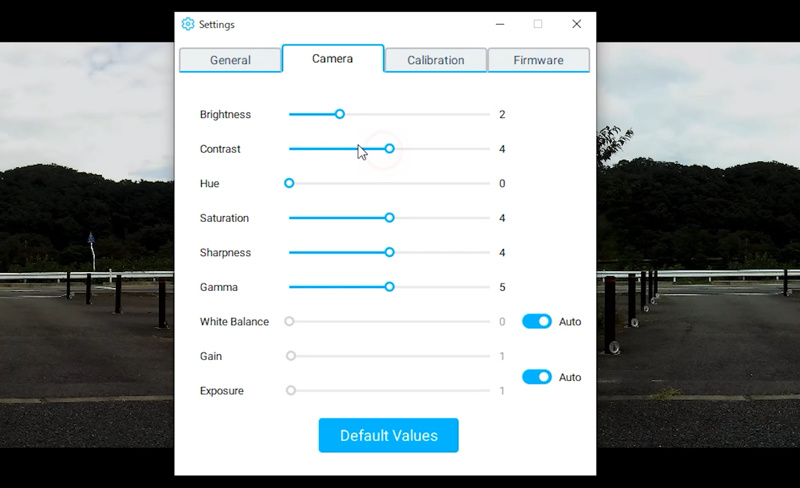
3Dカメラを接続するコンピュータのスペックは以下となります。
| CPU | Intel Core i9 9900K (3.60GHz 8コア) |
| メモリ | 16GB |
| GPU | NVIDIA Geforce RTX2080Ti 11GB |
| OS | Windows 10 Professional 64bit |
カメラと撮影対象 (人物) との位置関係は以下のような距離感となっています。

Intel RealSenseシリーズ
RealSense シリーズはそれぞれこのような形でデータが取得できました。
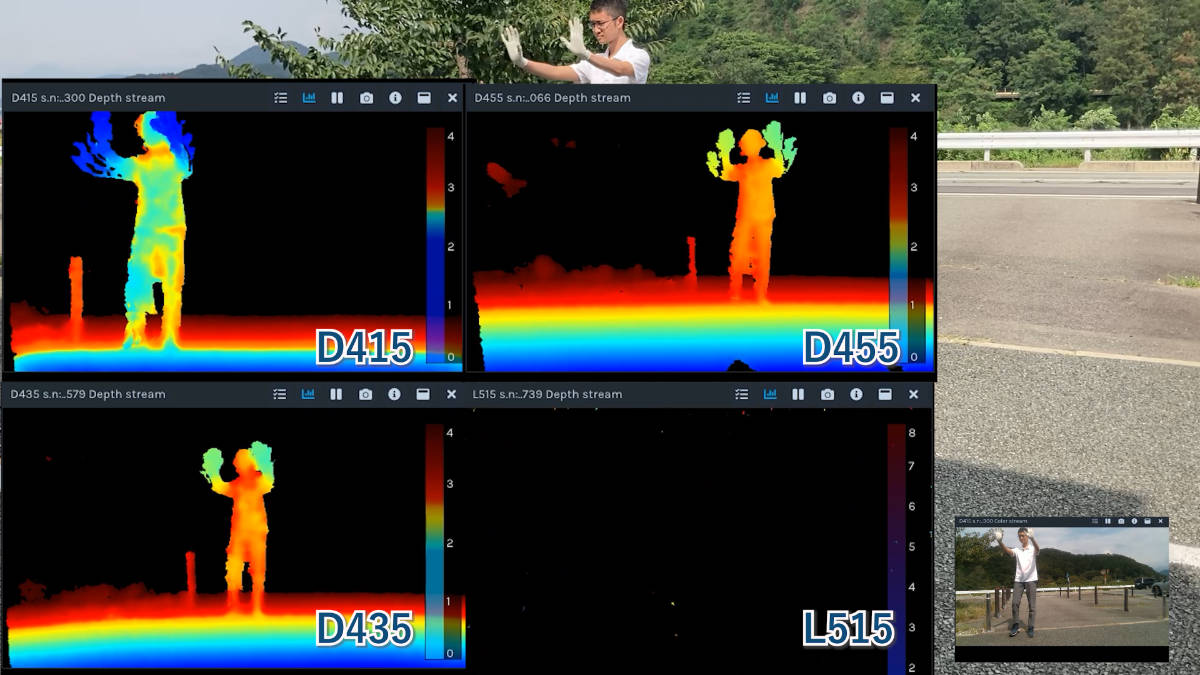
D415、D435、D455 はデータを取得できましたが、屋内向け用途が想定されているL515はデータを取得することができませんでした。
Stereolabs ZEDシリーズ
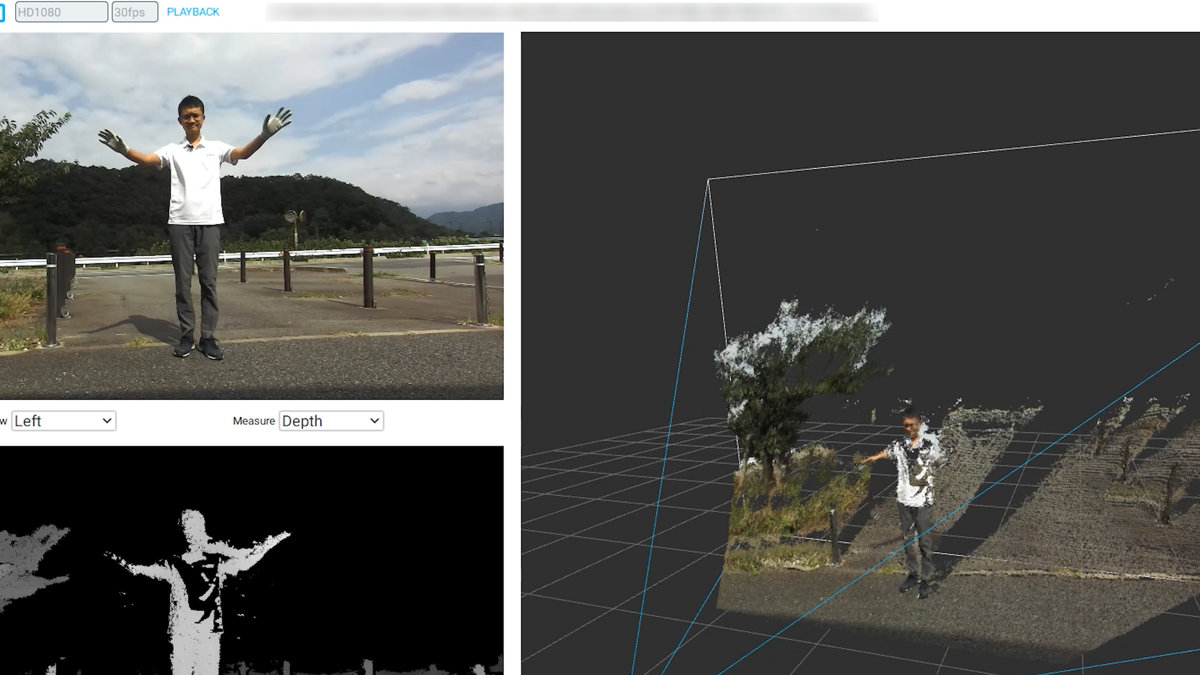
ZED 2 / ZED Mini はそれぞれこのような形でデータが取得できました。後ろに立っているポールも位置が分かります。
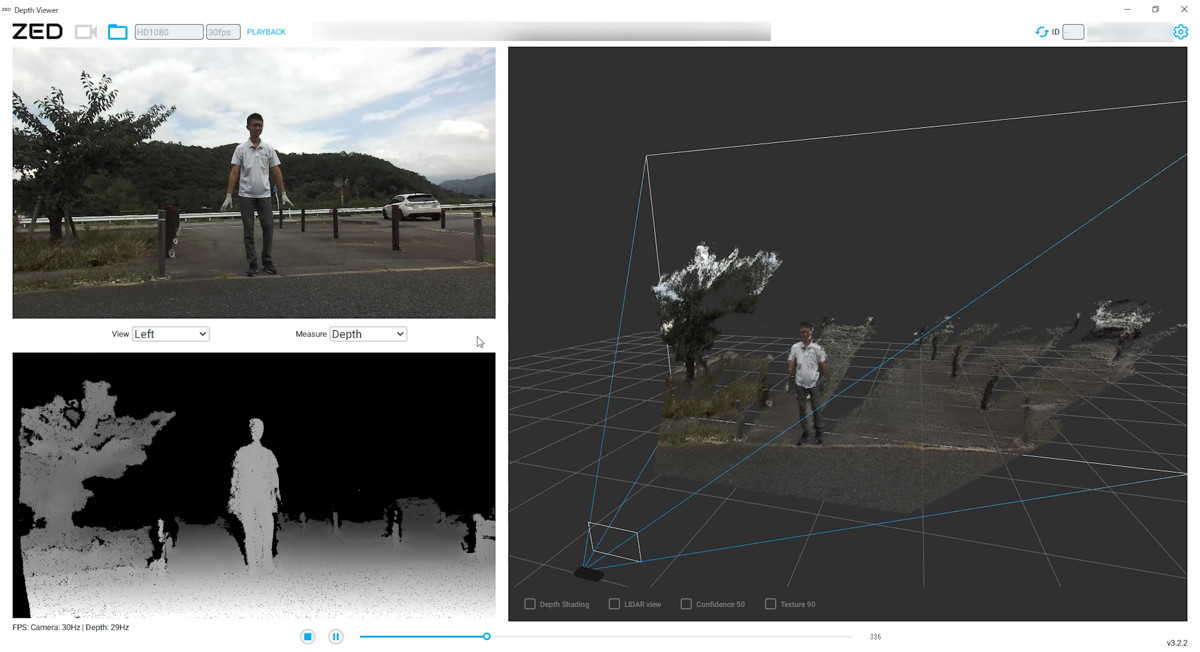
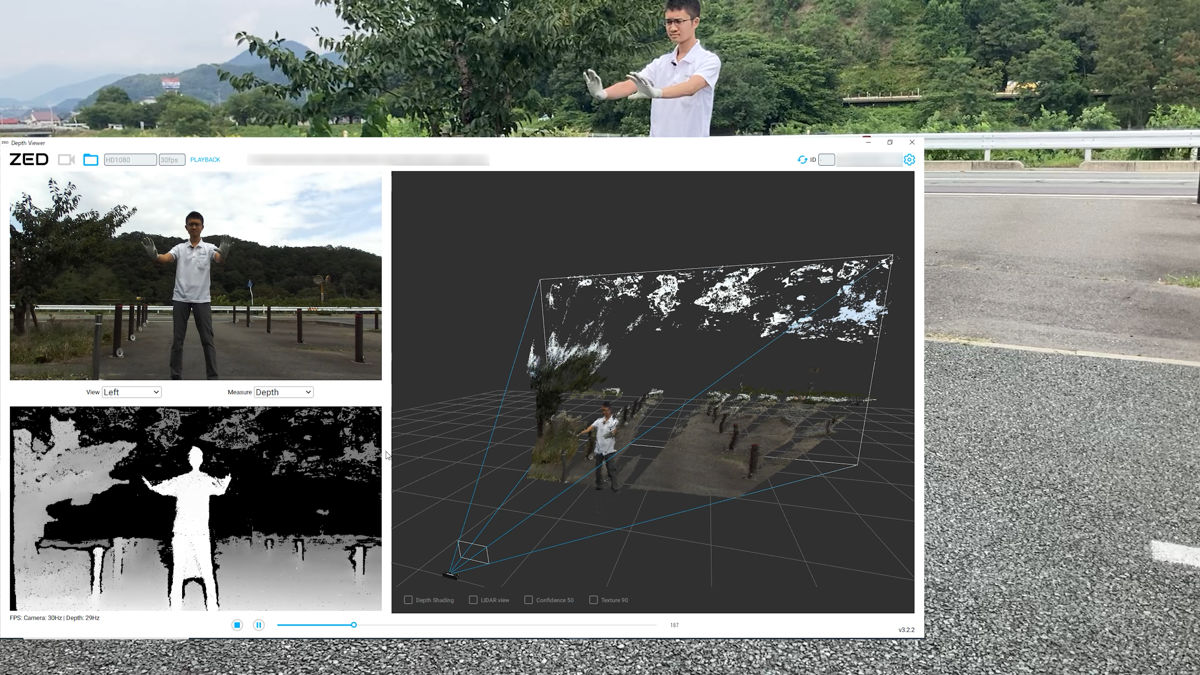
取得データが明るすぎる(シャツが真っ白に映る)等の場合,左右のカメラで視差が無いのか(※)、距離が得られなくなることがあります。カメラの設定を環境に合った設定に変えれば、取得できるようになる場合があります。
(※ZEDシリーズは2つのカメラの視差により深度情報を取得するパッシブステレオタイプの3Dカメラ)
Orbbec Astra Embedded S
Astra Embedded S はこのようにデータが取得できます。
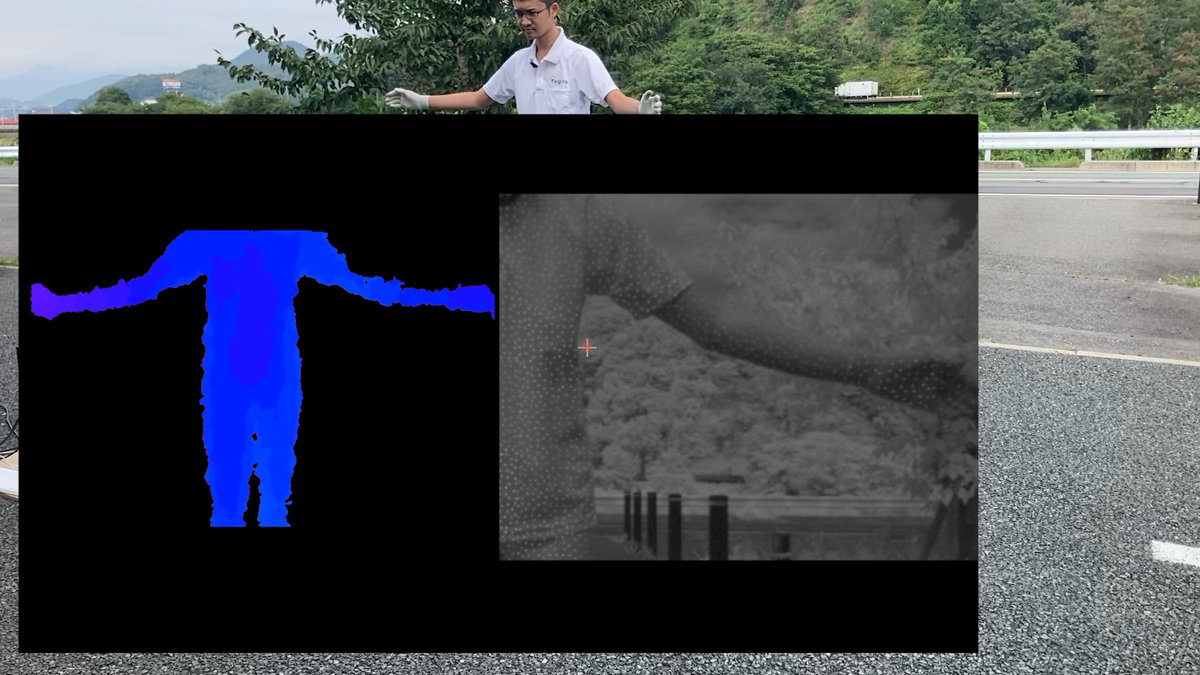
こちらは近距離(0.25m-1.5m)用途向けの製品ですが、距離が近ければ屋外でも使えそうです。
LIPS Corporation LIPSEdge DL
LIPSEdge DLは屋内用の製品のため、屋外では正常にデータを取得できませんでした。
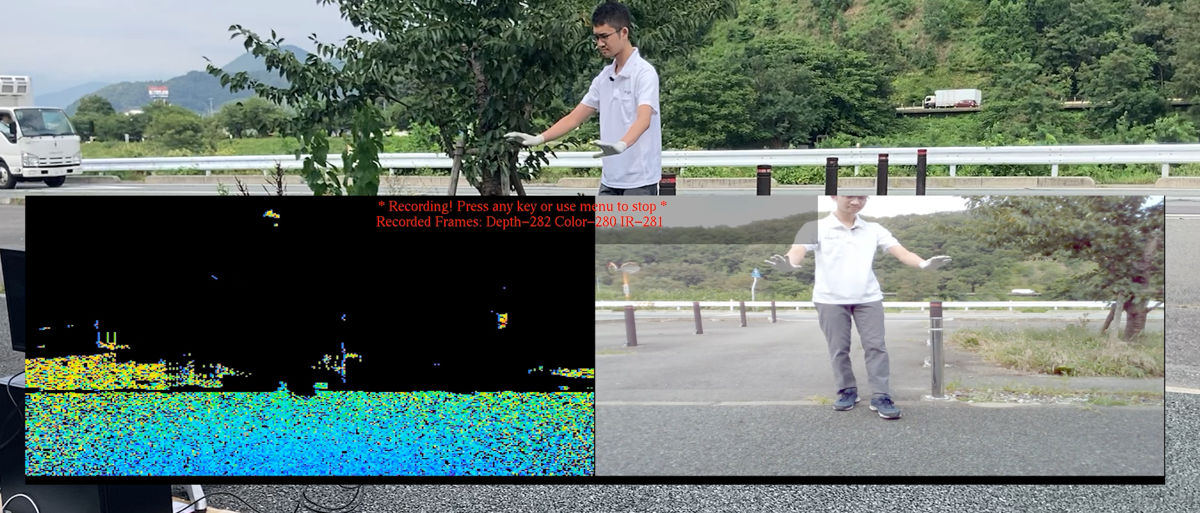
参考としてダンボールを持った状態での撮影で、カメラに向けたダンボールの角度を変えたところ、角度によってデータが取得できたりできなかったりするため、(物体反射後の)太陽光の影響を受けていると思われます。


★ 次回 屋内編 に続きます
次回は「屋内」で、今回と同じ8種類の3Dカメラの比較検証を行った様子をご紹介します。
「黒い物体を撮影するとどうなるのか」「鏡はどのように認識されるのか」「真っ暗な部屋では動作するのか」といった疑問を実際に検証してみましたので、こちらもどうぞお楽しみに。
屋内編の公開が待ちきれない!…という方は、動画の方では既に公開をしておりますので、ご覧いだけますと幸いです。
| 2020/9/7 追記: 3Dカメラ 8種類を 様々な環境で比較しました 【その② 屋内編】を公開しました! |

