

弊社では、海外製ハードウェアの調達代行と合わせて、お客様の用途にマッチしたカスタマイズや環境構築を積極的に承っています。
本記事では、模倣学習用途での人気が高い両手遠隔操作 オープンソース ロボットアーム ALOHA における固定用フレームのカスタマイズについてご紹介します。
両手遠隔操作 オープンソース ロボットアーム ALOHAとは
Aloha Kitsには、専用デスク上で操作する Aloha Stationary (旧名称:ALOHA Bimanual Teleoperation Kit) と差動駆動型ビークルを備えたコンパクトな機械学習キット Aloha Mobileがあります。 人工知能の研究分野におけるアクション・チャンキングの概念を応用した技術(トランスフォーマー・アクション・チャンキング)をベースとし、 分割された小さな単位の動作をトランスフォーマーのEncoderで表現し、複雑な行動を実現するためにアプローチします。手前のアーム2台を両手で操作、奥の2台のアームに操作内容を連動させ、模倣学習のための環境を低コストで実現できます。
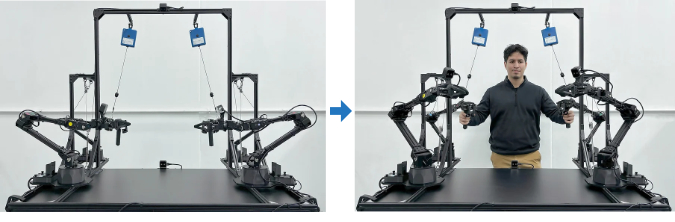
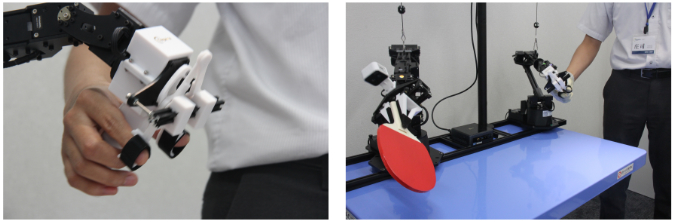
例えば、インシュロックタイ(結束バンド)を通すような精密なタスク、ピンポン玉のジャグリング等の動的なタスクなど、 接触が多いタスクを遠隔操作することができます。両手遠隔操作による制御は、約80-90%の成功率となっています。
より詳細な情報は、弊社の研究開発者向け海外製品調達サービス ユニポス のWEBサイトをご覧ください。
![]()
![]()
ALOHAの利用における問題
現在、メーカーであるTrossen Robotics社から提供されるキットには、アーム本体に加えてアームを固定するためのフレーム一式が含まれています。
しかし、お客さまの研究テーマや実験の内容、操作する対象物など、個別のニーズや環境の違いにより、メーカーから提供された固定用フレームをそのまま使用することができないケースがあります。弊社では、そのようなお客さまニーズや環境に合わせた問題解決のご相談を承っています。
例えば…
| ・組み立てに時間がかかる ・机のサイズに合わせて固定用フレームのサイズを調整できるようにしたい ・固定用フレーム上のアーム位置を、ある程度任意に移動できるようにしたい |
といったご要望に対応が可能です。
固定用フレームの寸法を再設計し、ご要望に応じて理想の環境を構築するための部材をご提供します。
ALOHAの設置環境をカスタマイズ
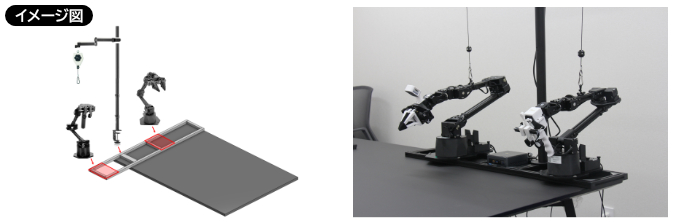
具体的な例として、「アーム位置の移動」「机のサイズに合わせた固定用フレームのサイズ調整」を実現した際の設計イメージをご紹介します。
■アーム位置の移動
片手のMaster Slaveの組み合わせを一つのユニットとして、調節可能な形でフレームを用意しました。
アーム取り付け部分のフレームは前後にスライドが可能です。
■机のサイズに合わせた固定用フレームのサイズ調整
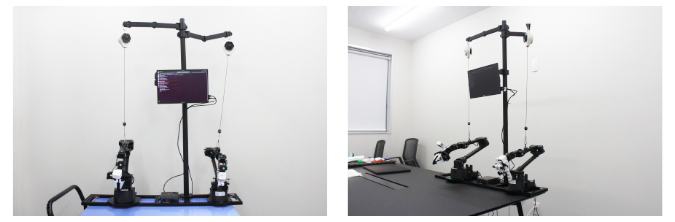
次に、重量保持部分は従来はアルミフレームからゴムを伸ばしてアームを支える形でしたが、支柱とツールバランサーで固定する形に変更することで、前後の調整を可能にしつつ、設置の手間の削減をしています。
これにより設置する机の環境についてもある程度柔軟に対応できるようになりました。
下記に使用したパーツの概要を記載いたします。
組み換えにあたり必要な部材は日本国内で一般的に入手可能なものです。
| 部品名称 | 個数 |
| デスククランプ | 2 (左右) |
| ツールバランサー | 4 |
| アルミフレーム | 一式(詳細省略) |
| ブラケット (アルミフレーム固定用) | 一式(詳細省略) |
| フレームキャップ (アルミフレーム保護用) | 一式(詳細省略) |
| プレート(アルミフレームのズレ保護用) | 一式(詳細省略) |
| アルミフレームナット | 一式(詳細省略) |
| ネジ類 | 一式(詳細省略) |
実際の設置イメージは下記の通りです。
個別のカスタマイズに限らず、現地での設置、セットアップも承っていますので、お気軽にご相談ください。
|
■ 製品のカスタマイズや現地設置、セットアップのご相談はこちら
※事例の名称またはご希望の条件などをご記入ください。 |



