

「ロボット」というキーワードを耳にした時、皆さんはどのようなイメージを持ちますでしょうか?
(ちょっと例えが古いかもしれませんが…)鉄腕アトムや鉄人28号のように、いわゆるヒューマノイドと呼ばれるような人間の姿を模倣したものが思い浮かぶかもしれません。
人間のように頭、胴体、腕、足の機能を備えたロボットとして有名なものには以下のようなものがあります。
- Pepper (ソフトバンクロボティクス株式会社)
- NAO (ソフトバンクロボティクス株式会社・Aldebaran Robotics SAS)
- ASIMO (本田技研工業株式会社)
また人型だけでなく動物型のロボットペットもイメージしやすいかと思います。
- aibo (ソニー株式会社)
- LOVOT (GROOVE X 株式会社)
これらのロボットは生物として認識されるような「身体」をもつことで、より私たちと近しい存在として認識されているロボットだと言えます。
今回は、こういった身体をもったロボットではなく、生物のもつ機能を個別に持ち合わせている…という視点で、世界中のロボットを「機能部位ごと」にピックアップしてみました。各メーカーにより公開されている、それぞれの製品の動画も併せてご紹介いたしますので、実際の動きやどんなことができるのかもご覧いただければと思います。
こちらの記事は「足回り – 移動 の機能を有するもの」編です。
「手・腕 – オブジェクト取り扱いの機能を有するもの」編はこちら。
足回り – 移動 の機能を有するもの
今回ご紹介するのは、車輪 や 脚などの機構を備えることで移動の手段を持ち合わせたロボットです。何かを目的地に運んだり、周辺環境を認識・調査するといった用途が想定され、例えば重量のあるものを運ぶことや人間には立ち入ることが難しい危険な現場 (災害時など)などで活躍します。
2005年に米国のボストン・ダイナミクス社が 開発した4足歩行ロボット「Big Dog」には、当時驚いた方もいらっしゃるのではないでしょうか (動画は2010年のものです)。
なおボストン・ダイナミクス社は人型ロボット「Atlas」も開発しています。こちらの動画でのアクロバティックな動きとそれを可能にする姿勢維持性能もすさまじいです。
車両型ロボット

タイヤなどの回転により移動するタイプのロボット。本体の下に小さなタイヤが付いたタイプ、車のように本体両側にタイヤを備えるタイプ、また全方位へ移動が可能なMecanumホイール(※)を備えるタイプなど、さまざまな形態があります。
iRobot Create 2 / iRobot (米国)
お掃除ロボットとして有名な「ルンバ」をベースとした手ごろな価格のロボット開発プラットフォーム。Arduino や Raspberry Pi と接続して動かす方法とPCと付属のケーブルを接続して動かす方法とがあります。教育・開発の現場で、ロボット工学やコンピュータ科学の基礎を学ぶためのSTEM(Science, Technology, Engineering, Math)リソースとして活用されています。
床の上を移動する様子ははまさに「緑色のルンバ」ですが、ソフトウェアのプログラミング、ハードウェアのカスタマイズで自分だけのロボットを作成できるのがポイントです。こちらのページでは iRobot Create 2 を使用したプロジェクト例もご覧いただけます。

Neobotix GmbH (ドイツ)
20年以上にわたりロボットの開発・製造を行う ドイツ Neobotix社製のモバイルロボット。産業の現場での利用や研究用ロボットプラットフォームとして、移動方法や有効荷重別に複数のモデルが用意されています。 また、各モバイルロボットにマニピュレータ・ロボットアームを統合したモバイル・マニピュレータや、工場内などでの自動輸送システムロボットもラインアップされています。
以下の動画で紹介されているのは、全方位へ移動のできるMecanumホイール(※)が採用されているモデル、MPO-500です。真横へのスライド移動や斜め移動、その場での回転等、4つのタイヤを駆使して自由度高く動くことができます。
※Mecanumホイールについて
どのような方向へも動くことのできる地上車両向けの全方向性ホイール設計。Mecanumホイールは タイヤのないホイールをベースとしており、ホイールリムの全周にゴム製のローラーが、ホイール平面に対して45度、車軸線に対して45度の回転軸を持って斜めに取り付けられています。各ホイールは、独立した非ステアリングドライブホイールであり、回転すると、ローラー車軸に垂直な推進力が生成されます。この仕組みにより、各ホイールの回転速度と回転方向を調整することにより、車両の直線運動や回転を可能にします。
例:
– 4つのホイール全てを同じ方向・同じ速度で動かすと、前後に動く
– 対角線上のホイール同士を同じ方向・同じ速度で動かすと、横に動く
– どちらか一方の対角線上のホイールを同じ方向、同じ速度で動かすと、斜めに動く
– 左側同士、右側同士、それぞれのホイールを同じ方向・同じ速度で動かすとその場で回転する
参照:Wikipedia : Mecanum wheel https://en.wikipedia.org/wiki/Mecanum_wheel

Rover Pro / Rover Robotics (米国)
屋外のあらゆる種類の環境に耐えるよう、IP67の防塵・防水性能を持った堅牢なロボット。ペイロードは最大100kgで、高トルクな2050KVインランナーブラシレスモータを搭載しており、 ブラシモータ搭載ロボットよりも長寿命で、また静かに動作します。駆動部分は前輪駆動の2WD、前後輪駆動の4WD、階段を上るといった動作も可能な Flipperから選ぶことができます。
以下の動画の12秒くらいの時点で、階段を上り下りしたり自身の機体を器用に回転させている、ティアドロップ型のホイールを装備しているのが Flipper モデルです。

Rover ProのメーカーであるRover Robotics 社のWEBサイトには、用途別に様々な車両型モバイルロボットの比較チャートが掲載されています。ご参照ください。
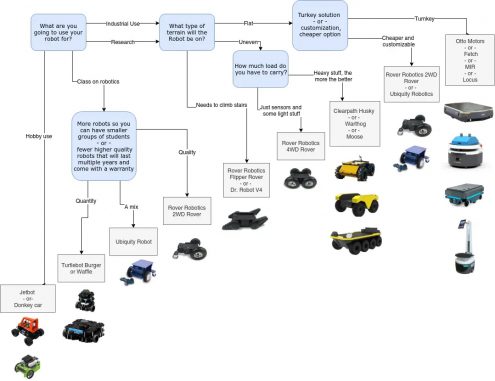
Docs Rover : FAQ > Is the Rover a good fit for my application ?
脚式ロボット
人間のような二足歩行、動物のような四足歩行、蜘蛛のように複数の足を器用に動かし前進するなど、複数の脚の役割を担う機構を使い移動するタイプのロボット。車両型の移動ロボットが踏み込むことの難しい複雑な地形、たとえば起伏のある地形や災害現場での活動などが視野に入れられています。
Ghost シリーズ / Ghost Robotics (米国)
商用無人機 (UGV) 開発や高度な歩行研究・シミュレーション、マシン学習などのための、4脚ロボットの研究開発プラットフォーム。階段や垂直の障害物(フェンス等)をのぼったり、岩場や砂地、氷上といった場所でもバランスをとって歩行するなど、さまざまな環境に対応したQ-UGVです。
以下は研究開発向けモデル Ghost Spirit シリーズの最新機、Spirit 40 の紹介動画です。動画の最初から足で蹴飛ばされてなんだかかわいそうに見えてしまいますが、体勢を崩したとしても器用に横回転をし、立て直しています。動画の後半では、アスファルトの上や芝生の上を軽快に走る様子が撮影されています (秒速6.5フィート)。

Pupper Robot / Cypress Software Inc. (米国)
「ロボット研究に誰もが参加できるよう」 に設計された、ローコスト、かつカスタマイズやプログラムが可能なオープンソースの小型四足歩行ロボット。米国の Stanford Student Robotics (スタンフォード大学の研究チーム)の Stanford Pupper がベースとなっており、Cypress Software社では ロボットの構築に必要なパーツ一式のセットや、組立済みのロボットなどを取り扱っています。
以下の動画は、Stanford Student Robotics により公開されている動画です。「Pupper (子犬)」の名の通り、まるでおすわりをしてこちらを見ているようなしぐさや、小さくジャンプするような動作を見て取れます。

手・腕と足回りの機能を併せ持つもの

手や腕のもつ「オブジェクトの取り扱い」と、足回りのもつ「移動」の機能を併せ持つことで、ロボットはより具体的なタスク (人間に近い行動)をこなせるようになります。
Stretch RE / hello robot (米国)
3Dカメラ、9自由度の慣性計測ユニット(IMU)とLiDAR、車載コンピュータなどを搭載した自律移動ロボットに、 人間の腕の代わりとなる細い伸縮アーム・グリッパーが取り付けられたモバイルマニピュレータ。デフォルトで付属する Compliant gripper は、バネとゴム製の吸盤が指先の役割をする、物体をつかむことに優れたグリッパーです。高い摩擦力で対象物と接触できることから、錠剤のような小さなものも掴むことができます。
現在販売されているのは 研究用途向けの Research Edition ですが、動画では人々の生活の中でStrech が活用されることが想定されています (hello robot社は、元Google社員のAaron Edsinger氏とジョージア工科大学のCharlie Kemp教授により設立され、ロボットの活用により、高齢者、障害者、介護者がより豊かで生活しやすくなるようモバイルマニピュレータ開発に取り組んでいます)。

なお、車両型ロボットの項で取り上げた「Neobotix 社」でも モバイルベースにロボットアームを取り付けた、「モバイル・マニュピレータシリーズ」が多数用意されています。こちらは、主に工場などで産業用途で用いられることが想定されています。
番外編 – 移動のために2つの機能を併せもつもの
最後にカリフォルニア工科大学のAerospace Robotics and Control 研究室が開発している小型ロボット、その名も「LEONARDO」についてご紹介します。
LEONARDOという名称は 「LEgs ONboAERD drOne」から名付けられており、よく見ると両椀にあたる部分にドローンのような配置で4枚のプロペラが取り付けられています。プロペラを回転することで姿勢を保ち歩行のバランスを取っている、ユニークな二足歩行ロボットです。
その他の機能部位 記事へのリンク
- 「手・腕 – オブジェクト取り扱いの機能を有するもの」編
- 「感覚の機能を受け持つもの」 編 (準備中)
※公開準備が出来次第、このページでもご案内します。


