

■こちらは、2021年1月26日に投稿された記事のため、情報の内容が古い可能性があります。
ユニポスWEBサイトに、フランス Niryo社の開発する、6軸制御の教育・研究用オープンソース・ロボットアーム Ned を追加しました。こちらはKickstarter発のロボットアーム Niryo One の次世代モデルにあたり、2021年1月にリリースされたばかりの新モデルとなります。
Nedは、Niryoシリーズの特徴である6軸制御であることに加え、 高い精度と再現性(0.5mm)、スムーズな動きを実現するアルミニウム構造採用などにより、 産業の現場で必要とされる複雑な動きを再現する協働ロボット (Cobot)向けモデルです。 Industry 4.0 指向に基づいた生産ラインでのロボット活用プロトタイピング(※)に適しています。
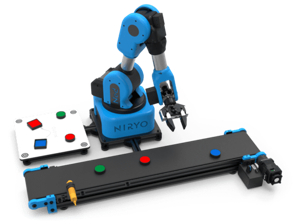
※Niryo の Ecosystem – Conveyor Belt / Vision Set を併せてご利用いただくのがおすすめです。Conveyor Belt、Vision Set の詳細については以下のページをご覧ください

Niryo One からの主なアップデート箇所
- 高度な用途において必要とされる動作を再現する 0.5mmの精度 (precision)と再現性 (repeatability)。
- アルミニウム構造による強固さとスムーズさにより、ロボットプロジェクトで必要とされる動作をスムーズに実現。
- 64-bit ARM V8 プロセッサ、2GB RAMを備え、接続性 (USB 3.0 / WiFi 5 / Bluetooth 5.0)が向上した Raspberry Pi 4 を搭載。
- Ubuntu 18.04 と ROS Melodic に基づいた 協働ロボット。ROSを通して複数のライブラリを利用でき、シンプルなものから複雑なものまで、様々なプログラムを考案することができます。
主な仕様
- Number of axis : 6
- Weight : 6.5 kg
- Payload : 0.3 kg
- Max Reach : 440 mm
- precision : 0.5 mm
- Repeatability : 0.5 mm
- Base joint range : +/- 175 °
- Power Supply : 11.1 Volts / 6A
- Communication :
– Ethernet 1 Gb/s
– WIFI 2.4GHz & 5GHz – 802.11 g/g/n/ac
– Bluetooth 5.0 BLE
– USB - Interface/Programming : Windows/MacOS/Linux (desktop application) & APIs
- Power consumption : ~ 60 W
- Materials : Aluminium, PLA (impression 3D)
- Ports : 1 Ethernet + 2 USB 3.0 + 2 USB 2.0
- Electronics / Motorization
– Raspberry pi 4
– + 3 x NiryoSteppers
– + 2 x Dynamixel XL – 430
– + 1 x Dynamixel XL – 320 - Collision detection sensor: Magnetic sensor (on motor)
その他のNed の特長として、Niryo One と同様にエンドエフェクタパーツを付け替えることで様々なオブジェクトを取り扱うことができ、またロボットを直接手で動かし動作を学習させるラーニングモードや、Blocklyベースのオリジナルデスクトップアプリケーション(Niryo Studio)により、プログラミングの知識がなくともロボットアームをコントロールすることが可能です (ROSやPython, C++でのプログラミングも可) 。
Meet Ned, the new 6-axis collaborative robot for Education and Research
|
■商品の詳細、お問い合わせはこちら |


